
RoboTAP笔记
内容提要
RoboTAP是一种基于点追踪技术的少样本视觉模仿方法,能够在多个任务中实现机器人精准操作,快速添加新任务。尽管存在视觉控制和运动规划的限制,RoboTAP在教授视觉运动技能方面表现出色。作者提出了多任务操作问题的制定和新的密集跟踪数据集等四个贡献。
关键要点
-
RoboTAP是一种基于点追踪技术的少样本视觉模仿方法,能够在多个任务和场景中实现机器人精准操作。
-
RoboTAP不需要特定于任务的训练或神经网络微调,添加新任务只需几分钟。
-
RoboTAP在快速教授视觉运动技能和轻松演示所需行为的情况下最为有效。
-
RoboTAP存在一些限制,包括低级控制器的纯视觉特性和运动规划的单次计算执行。
-
作者提出了四个贡献,包括多任务操作问题的制定、新的密集跟踪数据集和RoboTAP的具体实现。
-
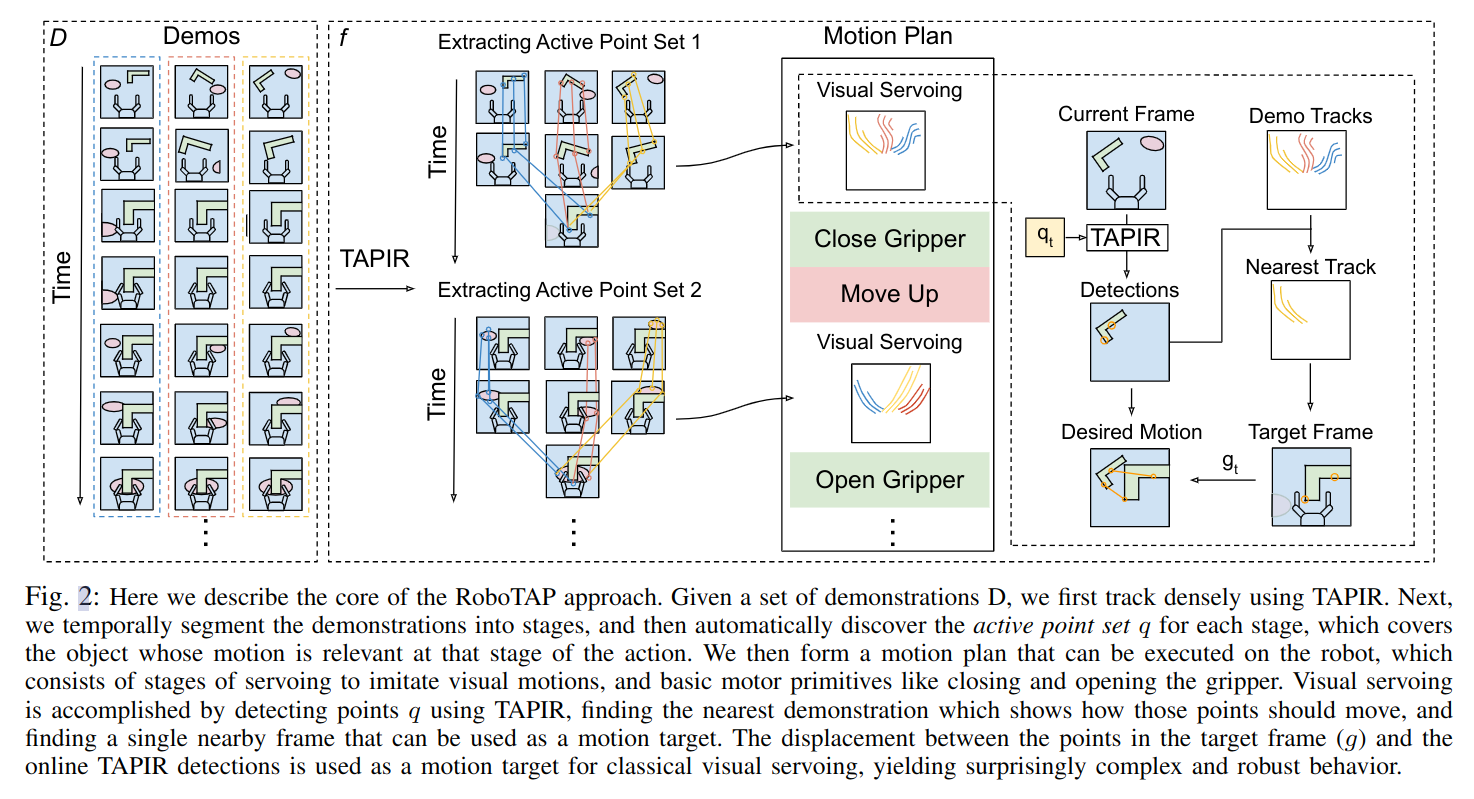
RoboTAP的核心是利用TAPIR密集跟踪演示,自动发现活动点集并形成可执行的运动计划。
延伸解读
RoboTAP的应用潜力
RoboTAP的快速任务添加能力使其在实际应用中具有很大潜力,尤其是在需要快速适应新环境或任务的场景中。这种灵活性可以大幅提升机器人在动态环境中的工作效率,尤其是在工业自动化和服务机器人领域。
技术限制与挑战
尽管RoboTAP在视觉运动技能的教授上表现出色,但其依赖纯视觉控制的特性限制了其在复杂运动规划中的应用。这意味着在面对不可预见的环境变化时,RoboTAP可能无法有效应对,用户在实际应用时需谨慎考虑这些限制。
多任务操作的研究价值
作者提出的多任务操作问题和新的密集跟踪数据集为未来的研究提供了重要基础。这些贡献不仅推动了机器人技术的发展,也为学术界提供了新的研究方向,尤其是在如何提高机器人自主学习和适应能力方面。
延伸问答
RoboTAP是什么技术?
RoboTAP是一种基于点追踪技术的少样本视觉模仿方法,能够实现机器人在多个任务中的精准操作。
RoboTAP如何添加新任务?
RoboTAP添加新任务只需几分钟,不需要特定于任务的训练或神经网络微调。
RoboTAP的主要限制是什么?
RoboTAP的主要限制包括低级控制器的纯视觉特性和运动规划的单次计算执行。
RoboTAP的核心机制是什么?
RoboTAP的核心是利用TAPIR密集跟踪演示,自动发现活动点集并形成可执行的运动计划。
RoboTAP在视觉运动技能教学中的表现如何?
RoboTAP在快速教授视觉运动技能和轻松演示所需行为的情况下表现出色。
RoboTAP的贡献有哪些?
作者提出了四个贡献,包括多任务操作问题的制定、新的密集跟踪数据集和RoboTAP的具体实现。
