
Realtime-VLA V2——如何让vla运行的更快:从让π0实时抓取下落的钢笔到让 VLA 运行得更快、更平滑且更精确
内容提要
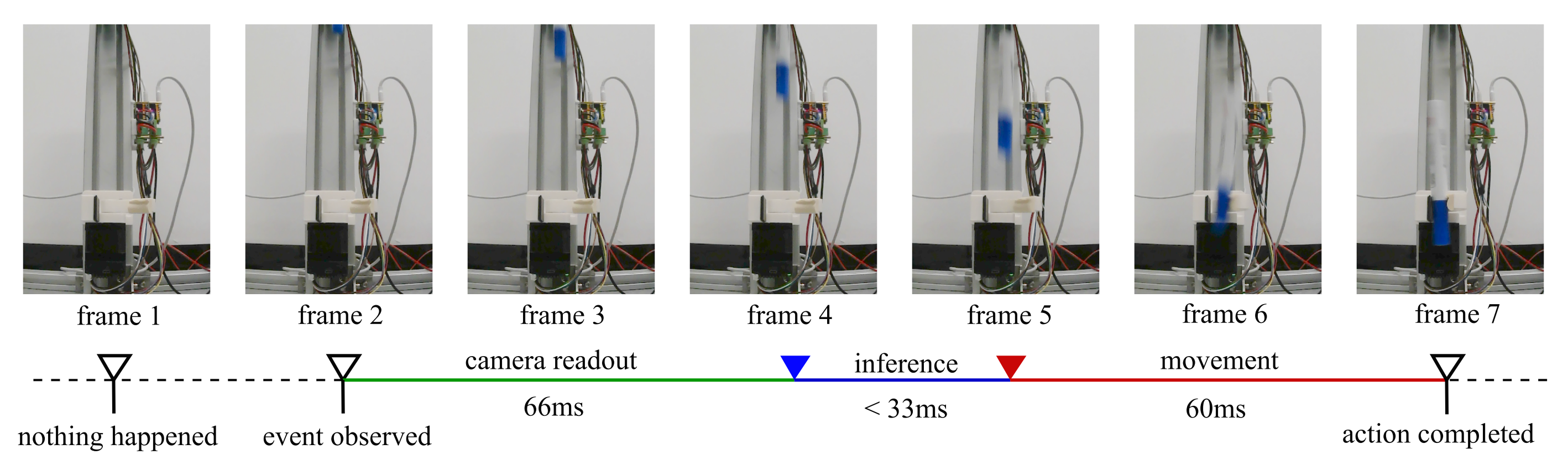
本文探讨了基于消费级GPU的实时视觉-语言模型(VLA)机器人控制技术。通过优化推理流程,推理延迟降低至27.3毫秒,抓取成功率达到100%。研究表明,VLA在机器人控制中可有效满足实时操作需求。
关键要点
-
本文探讨了基于消费级GPU的实时视觉-语言模型(VLA)机器人控制技术。
-
通过优化推理流程,推理延迟降低至27.3毫秒,抓取成功率达到100%。
-
作者提出了一系列策略以消除模型推理中的各种开销,提升实时性能。
-
VLA模型能够在单张消费级RTX 4090 GPU上实现实时运行,满足动态任务的需求。
-
作者将VLA的结构映射为完整的控制算法,称为全流式推理模式,能够以最高480Hz的频率生成控制信号。
延伸解读
实时性能的关键意义
本文展示了如何通过优化推理流程,使VLA模型在机器人控制中实现实时性能。这一进展不仅提升了抓取成功率,还为动态任务的执行提供了新的可能性,尤其是在需要快速反应的场景中,如抓取移动物体。
技术优化的实用策略
作者提出的多项优化策略,如使用CUDA图消除CPU开销和简化计算图,显著降低了推理延迟。这些技术手段为其他研究者在类似领域的应用提供了参考,尤其是在追求高效能的实时系统中。
VLA模型的应用前景
VLA模型的全流式推理模式使其能够以高达480Hz的频率生成控制信号,触及实时力控制的门槛。这为未来的机器人控制系统设计提供了新的思路,尤其是在需要高频率反馈的复杂任务中。
延伸问答
Realtime-VLA V2的主要技术特点是什么?
Realtime-VLA V2基于消费级GPU,优化推理流程,推理延迟降低至27.3毫秒,抓取成功率达到100%。
VLA模型如何实现实时运行?
VLA模型通过CUDA图方法消除CPU开销,并优化计算图和内存操作,实现实时运行。
VLA在机器人控制中的应用效果如何?
VLA在抓取下落物体的任务中达到了100%的成功率,满足了实时操作需求。
如何优化VLA模型的推理速度?
通过消除CPU开销和去除冗余计算,采用CUDA图和简化图的方法来优化推理速度。
VLA模型的结构是怎样的?
VLA模型主要包括视觉-语言模型(VLM)和动作专家(AE),通过混合训练实现开放世界泛化能力。
VLA模型的实时控制频率是多少?
VLA模型能够以最高480Hz的频率生成控制信号,满足实时力控制的需求。
