
嚯!35家大型央国企实测后,因果世界模型落地了
量子位
·


一分钟读论文:《Qwen-AgentWorld:通用智能体的语言世界模型》
Micropaper
·

一分钟读论文:《OPINE-World:程序化世界模型与本体论误差引导的交互探索》
Micropaper
·
98年哈工大教授创业,要做人形灵巧操作世界模型
量子位
·
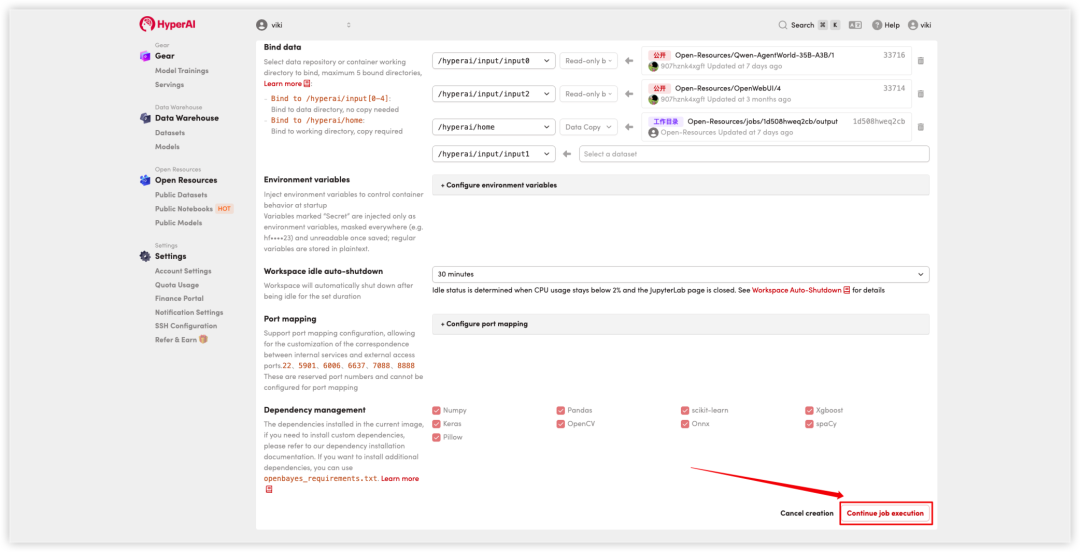
在线教程|阿里千问团队开源首个原生语言世界模型,一个模型打通终端、网页与手机智能体交互
HyperAI超神经
·
