摩尔线程发布了MT Lambda,这是首个全栈国产化的具身智能仿真平台。该平台通过仿真训练机器人,实现了Sim-to-Real的验证,整合了物理、渲染和AI引擎,显著提升了机器人训练的效率和真实感,标志着国产GPU在具身智能领域的重大进展。
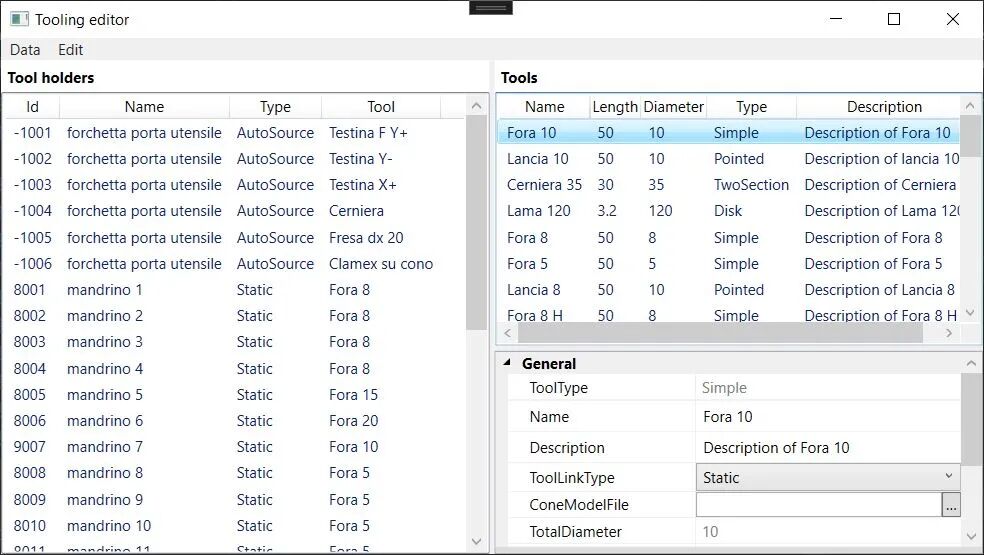
该项目是基于.NET 8.0开发的数控机床仿真平台,支持机床结构、工装和刀具的编辑与三维可视化,采用WPF + MVVM架构,具备高保真材料移除仿真和数据集中管理功能,提升了性能与兼容性。
智元机器人推出开源仿真平台Genie Sim 3.0,结合大语言模型与三维重建技术,提供高保真仿真环境,支持自然语言生成场景,拥有丰富的仿真数据集,提升研发效率,推动智能应用创新。
现代机器人开发中,传统方法依赖硬件收集数据,成本高且受限。云计算的发展使基于云的机器人仿真平台成为替代方案,支持远程操作和数据收集,降低硬件成本,提高实验效率。通过AWS和NVIDIA Isaac Sim,开发者能够高效验证和迭代机器人算法。
本研究提出了SpiderSim,一个轻量级的网络安全仿真平台,旨在应对工业数字化带来的复杂网络安全需求。该平台通过统一建模框架和多智能体协作机制,提高了场景生成的效率和多样性。
该综述介绍了具身智能的最新进展和发展现状,包括具身机器人、具身仿真平台、具身感知、具身交互、具身智能体和虚拟到现实的迁移等方面。调研了近400篇文献,提供了全面的研究分析和技术见解。讨论了具身智能面临的挑战和未来发展方向。目标是为具身智能研究提供参考并推动技术创新。
本文介绍了一种多智能体强化学习模型,能够在不同场景中优化排名策略。该模型利用深度学习实现迁移学习,提升了在复杂环境中的表现。研究探讨了多智能体的协调与通信模式及其在自主移动中的应用,并提出了可扩展的仿真平台SMART,以推动多机器人强化学习的发展。
本文介绍了SMART平台,一个用于多机器人强化学习的仿真平台,提供多样化的交互场景进行训练,并支持基于插件的算法实现。研究者还开源了仿真环境、基准测试任务和基线模型,以推动多机器人强化学习的研究。
完成下面两步后,将自动完成登录并继续当前操作。