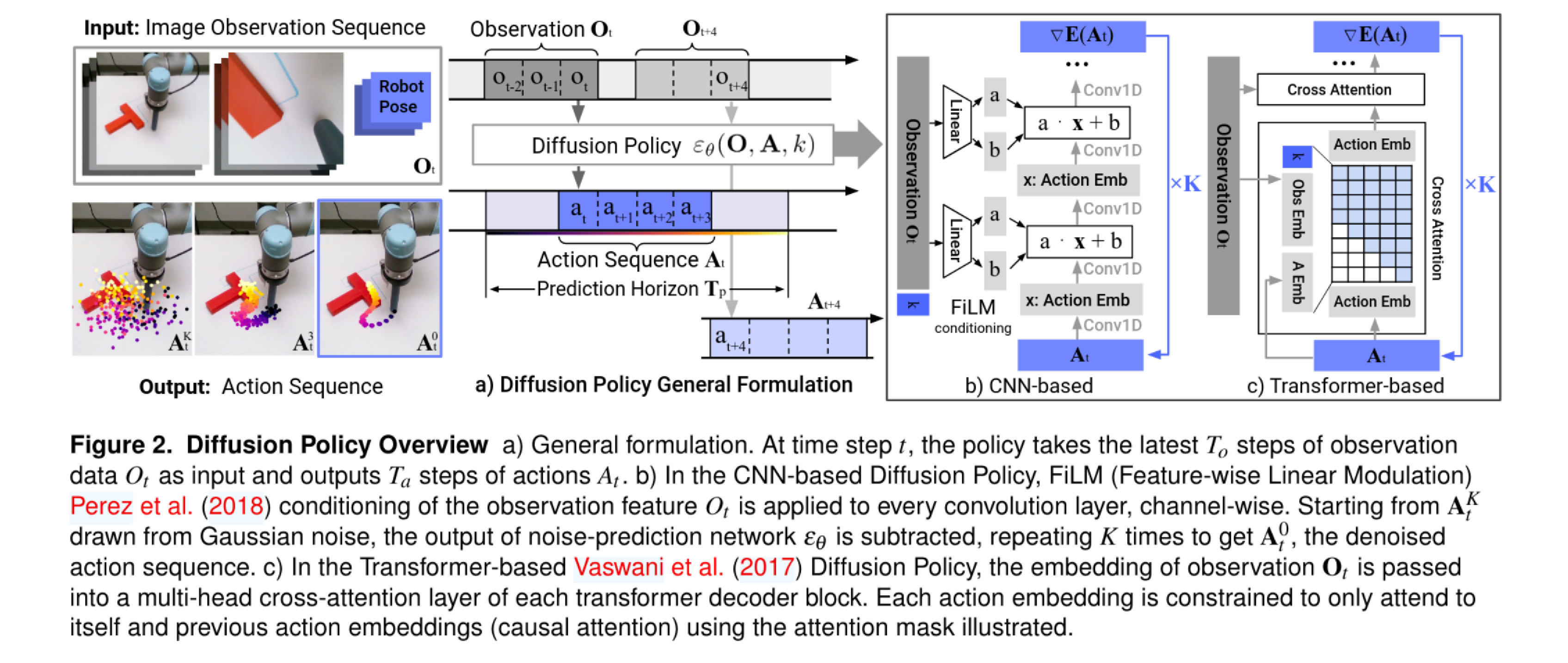
本文讨论了Diffusion Policy在机器人动作规划中的应用。通过神经网络预测噪声并逐步去噪,机器人能够生成精准的动作轨迹。尽管面临视觉遮挡和物理干扰,机器人依然能重新规划路径,展现出强大的适应能力。研究表明,该模型在学习物理系统动力学方面表现出色。
本文介绍了NaVid,一个用于视觉与语言导航的新模型。NaVid通过视频输入和自然语言指令,在连续环境中导航,无需地图或深度信息。该模型结合预训练的视觉编码器和大型语言模型,实现高效的动作规划,展现出优越的泛化能力和鲁棒性,尤其在仿真到现实的应用中表现突出。
LeCun团队推出PEVA模型,实现了16秒的连贯场景预测,赋予机器人具身智能,能够主动理解环境。该模型通过结构化动作表示和条件扩散Transformer,模拟人类预判能力,提升智能体的动作规划和视觉生成,标志着AI从“人工智障”向“人工预判”的进化。
本研究提出了以技能为中心的框架MOSAIC,旨在解决机器人和人工智能领域的长时间跨度动作规划问题。该框架通过整合技能生成与连接,系统化探索技能组合,有效应对复杂任务,展现出重要的应用潜力。
智元机器人团队提出的EnerVerse架构,通过自回归扩散模型解决机器人动作规划中的模态对齐和数据稀缺问题,结合稀疏记忆机制和自由锚定视角,显著提升了4D生成能力和动作规划性能,实验结果表明在视频生成和动作规划任务中表现优异。
智元机器人推出的EnerVerse架构结合自回归扩散模型,显著提升了机器人在具身智能领域的动作规划能力。通过稀疏记忆机制和自由锚定视角,EnerVerse在4D生成和动作规划任务中达到了当前的最先进水平,展现出优越的性能和逻辑合理性。
本文介绍了多个机器人任务与动作规划的基准测试,如ManiSkill2、FurnitureBench和COLOSSEUM,旨在评估不同算法在复杂环境中的表现。研究发现,现有算法在环境扰动下的成功率显著下降,强调了提高操作泛化能力的重要性。此外,RobotScript平台和Manipulate-Anything方法展示了基于大型语言模型的机器人操作策略生成的潜力。
本文介绍了一种基于自然语言的人机协作接口RoboTool,结合大型语言模型与轨迹信息,通过模仿学习和实验验证其在机器人任务中的有效性。该系统能够接受自然语言指令并生成可执行的机器人控制代码,扩展机器人的能力。同时,研究展示了利用自然语言推理改善机器人动作规划的潜力,并提出新方法以克服自然语言的限制,实现更复杂的任务。
本文提出了一种新型超声波嵌入式智能系统,结合大型语言模型和领域知识,提升超声波机器人的智能和操作效率。该系统能够根据医生的口头指令进行精确动作规划和动态调整扫描计划,从而显著提高超声波扫描的效率和质量,为自主医学扫描技术的发展奠定基础。
完成下面两步后,将自动完成登录并继续当前操作。