
刚刚,LeCun团队让世界模型学会持续学习!
量子位
·
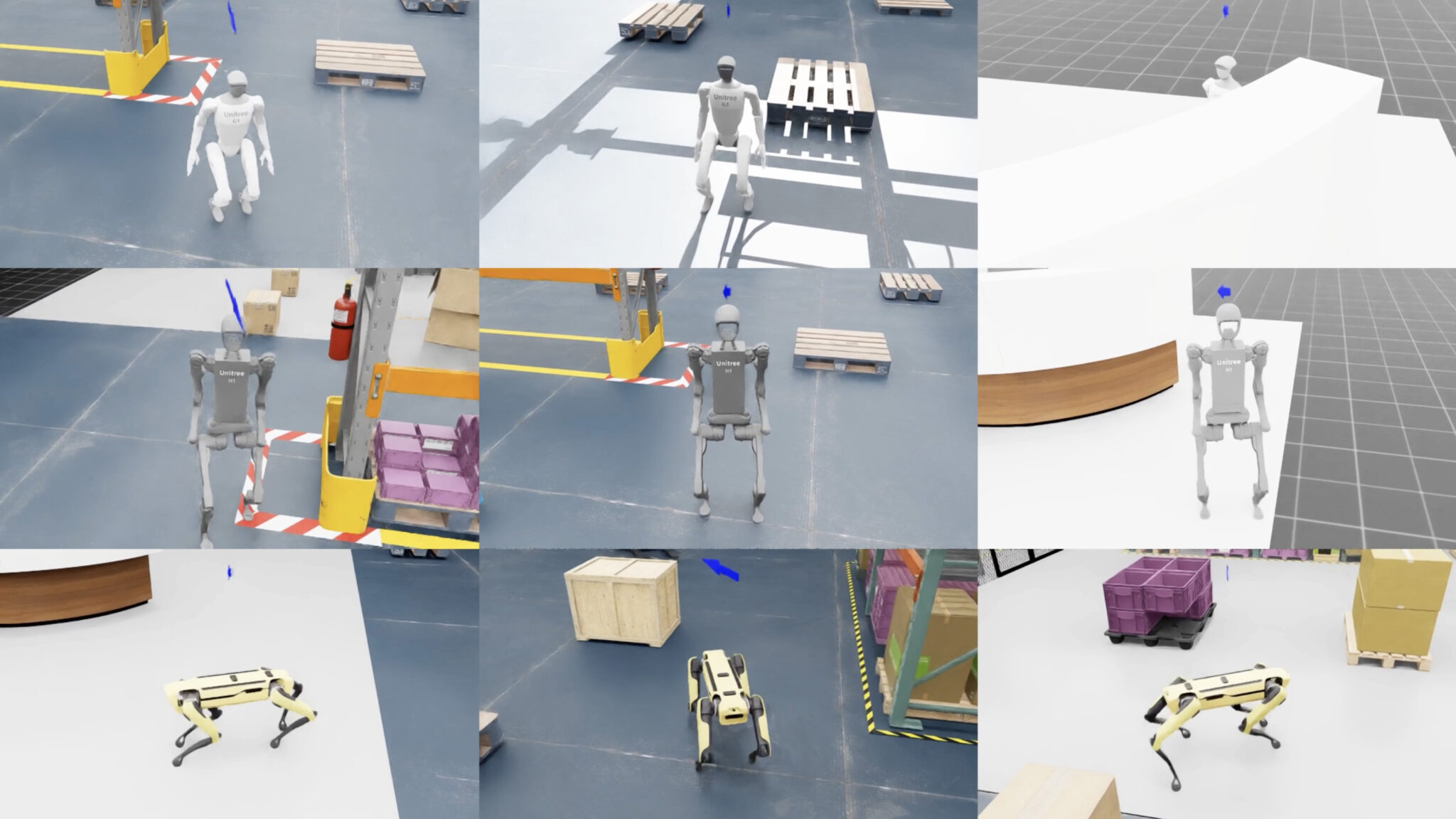
NVIDIA研究推动机器人技术从模拟走向现实
NVIDIA Blog
·
MEM——解决VLA长时记忆问题的框架:短时靠高效视频编码抓细节,长线凭文本记忆系统记进度
结构之法 算法之道
·
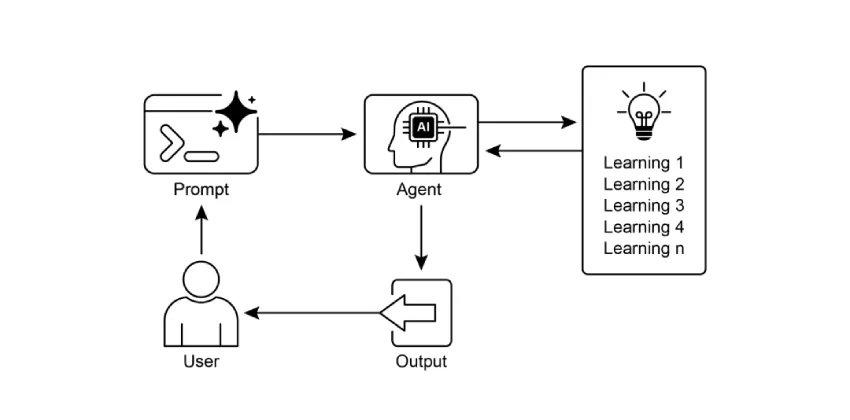
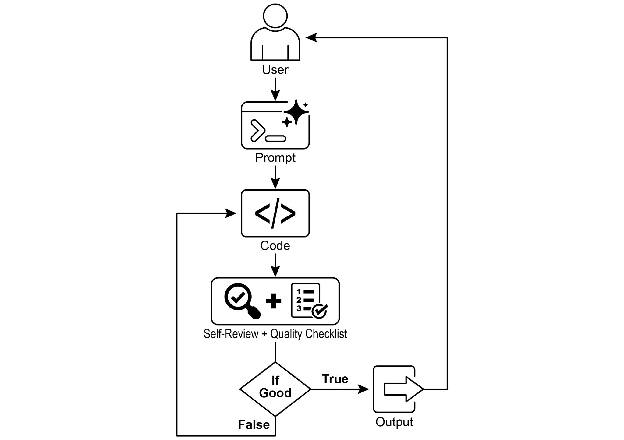
Agent设计模式——第 11 章:目标设定和监控
XINDOO的博客
·
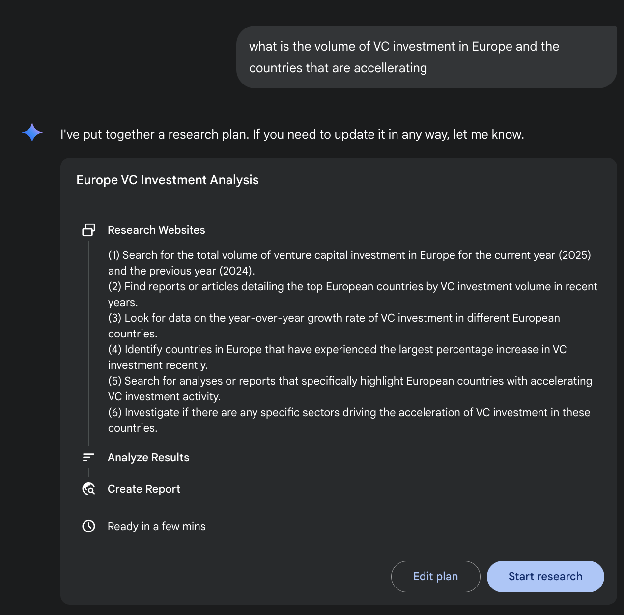
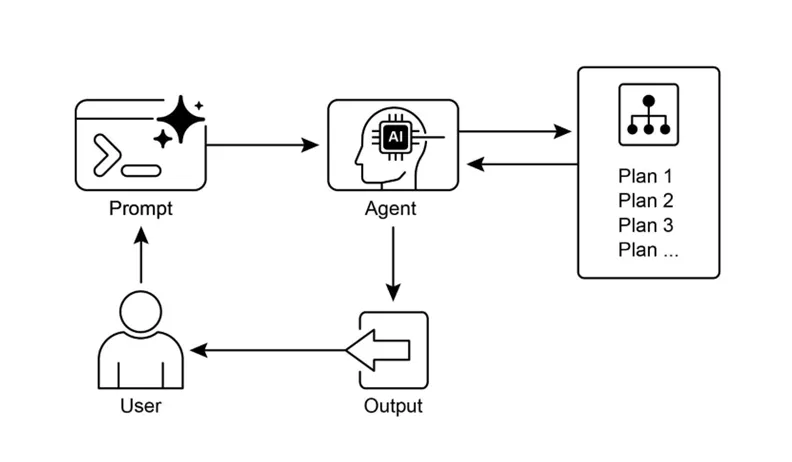
Agent设计模式——第 6 章:规划
XINDOO的博客
·
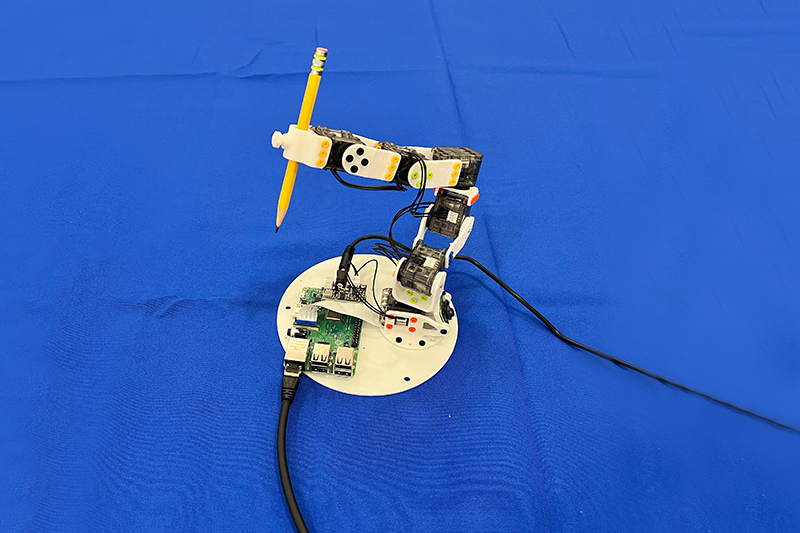
机器人,认识你自己:新视觉系统教会机器理解自身
MIT News - Artificial intelligence
·

2025年最佳五款免费反向代理解决方案
DEV Community
·
深入理解大型语言模型的推理能力
BriefGPT - AI 论文速递
·
