
《Agentic Design Patterns:构建智能系统的实战指南》- 第六章 规划
内容提要
本文翻译了《智能体设计模式》第六章,强调规划在智能体编程中的重要性。规划帮助智能体将复杂目标分解为可管理的步骤,并自主制定实现策略。智能体通过适应性应对变化,优化任务执行,尤其在动态环境中表现优异。规划模式为复杂问题提供结构化解决方案,提升智能体执行能力。
关键要点
-
规划在智能体编程中至关重要,帮助将复杂目标分解为可管理的步骤。
-
智能体通过适应性应对变化,优化任务执行,尤其在动态环境中表现优异。
-
规划模式为复杂问题提供结构化解决方案,提升智能体执行能力。
-
动态规划是一种特定工具,适用于已知解决方案的问题。
-
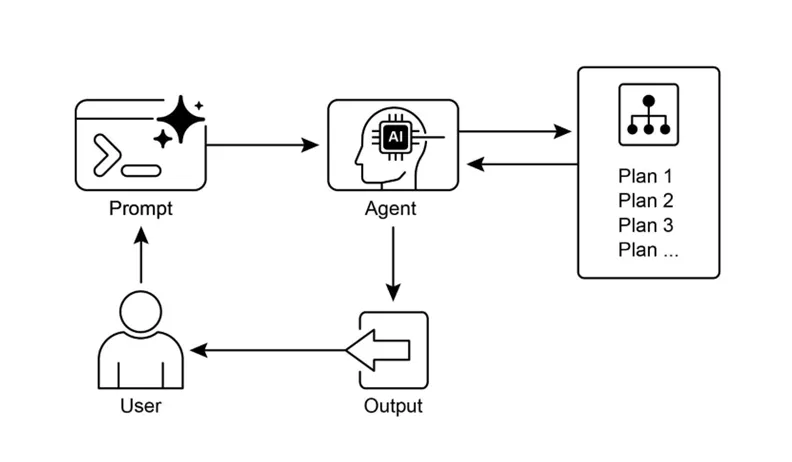
智能体能够将高级目标转换为结构化计划,协调复杂工作流程。
-
在机器人技术和自主导航中,规划是状态空间遍历的基础。
-
规划模式允许智能体超越简单反应,转向目标导向的行为。
-
Crew AI 框架展示了如何实现规划器模式,智能体先制定计划再执行。
-
Google Gemini DeepResearch 通过多步骤代理管道进行自主信息检索和合成。
-
OpenAI 深度研究 API 自动化复杂研究任务,提供结构化、引用的输出。
-
规划模式是将代理系统提升为战略性执行者的基础组件。
延伸解读
规划的重要性
在智能体编程中,规划不仅是任务执行的基础,更是实现复杂目标的关键。通过将目标分解为可管理的步骤,智能体能够更有效地应对动态环境中的变化。这种能力使得智能体在处理多步骤任务时,能够灵活调整策略,确保最终结果的成功。
动态规划的应用
动态规划是一种特定的工具,适用于已知解决方案的问题。它通过限制代理的自主性,减少不确定性和不可预测行为的风险,从而保证结果的可靠性。在实际应用中,选择合适的规划模式可以显著提升智能体的执行效率,尤其是在复杂的工作流程中。
智能体的适应性
智能体的适应性是其成功的关键。当初始计划受到限制时,智能体能够重新评估选项并制定新的计划。这种灵活性使得智能体在面对不可预见的障碍时,能够迅速调整策略,确保任务的顺利进行。
延伸问答
规划在智能体编程中有什么重要性?
规划帮助智能体将复杂目标分解为可管理的步骤,并自主制定实现策略。
智能体如何应对动态环境中的变化?
智能体通过适应性应对变化,优化任务执行,能够整合新信息并调整计划。
什么是动态规划,它适用于什么情况?
动态规划是一种特定工具,适用于已知解决方案的问题,帮助智能体在固定工作流程中有效执行任务。
规划模式如何提升智能体的执行能力?
规划模式为复杂问题提供结构化解决方案,使智能体能够将高级目标转换为可执行的步骤。
Crew AI 框架是如何实现规划器模式的?
Crew AI 框架通过让智能体先制定多步骤计划,然后按顺序执行该计划来实现规划器模式。
OpenAI 深度研究 API 的主要功能是什么?
OpenAI 深度研究 API 自动化复杂研究任务,提供结构化、引用的输出,支持高级查询的分解和执行。
