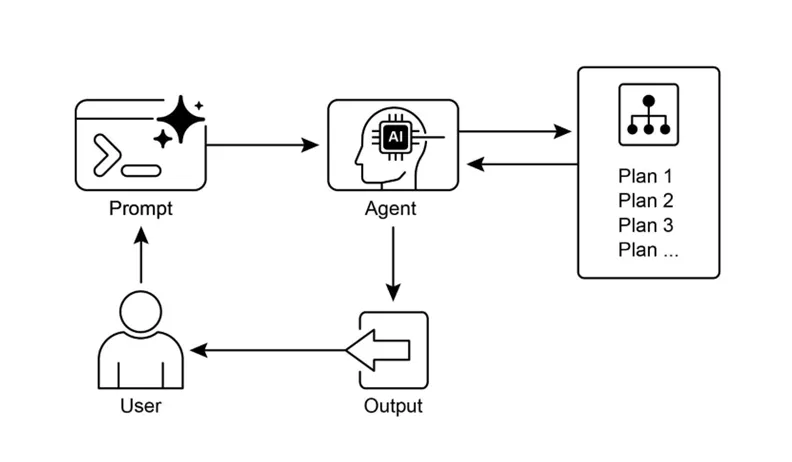
本文翻译了《智能体设计模式》第六章,强调规划在智能体编程中的重要性。规划帮助智能体将复杂目标分解为可管理的步骤,并自主制定实现策略。智能体通过适应性应对变化,优化任务执行,尤其在动态环境中表现优异。规划模式为复杂问题提供结构化解决方案,提升智能体执行能力。
本研究提出了CubeRobot,一种新颖的视觉语言模型,旨在提升Rubik's Cube机器人的适应性和执行能力。CubeRobot在低级和中级恢复任务中实现了100%的准确率,展现了其在复杂任务中的应用潜力。
本研究提出了一种结合大型语言模型、知识图谱和人类输入的框架,以解决智能体在新场景中执行新任务时的资源不足问题。实验结果表明,该方法在烹饪和清洁任务中显著提升了智能体的执行能力。
设计领导的角色正在转变,传统的“设计负责人”已不再适用。设计领导应关注团队、实践和战略,促进创新与团队表现。随着行业需求变化,设计领导需具备更强的执行能力,同时保持对设计思维的理解,以推动业务成功。
完成下面两步后,将自动完成登录并继续当前操作。