
NVIDIA研究推动机器人技术从模拟走向现实
内容提要
NVIDIA的研究展示了机器人在动态环境中从模拟到现实的转变,强调了其感知、推理和行动的能力。通过新方法COMPASS和Grasp-MPC,机器人在复杂任务中展现出更高的成功率和适应性,为机器人技术在真实世界中的应用奠定了基础。
关键要点
-
NVIDIA的研究展示了机器人从模拟到现实的转变,强调了其在动态环境中的感知、推理和行动能力。
-
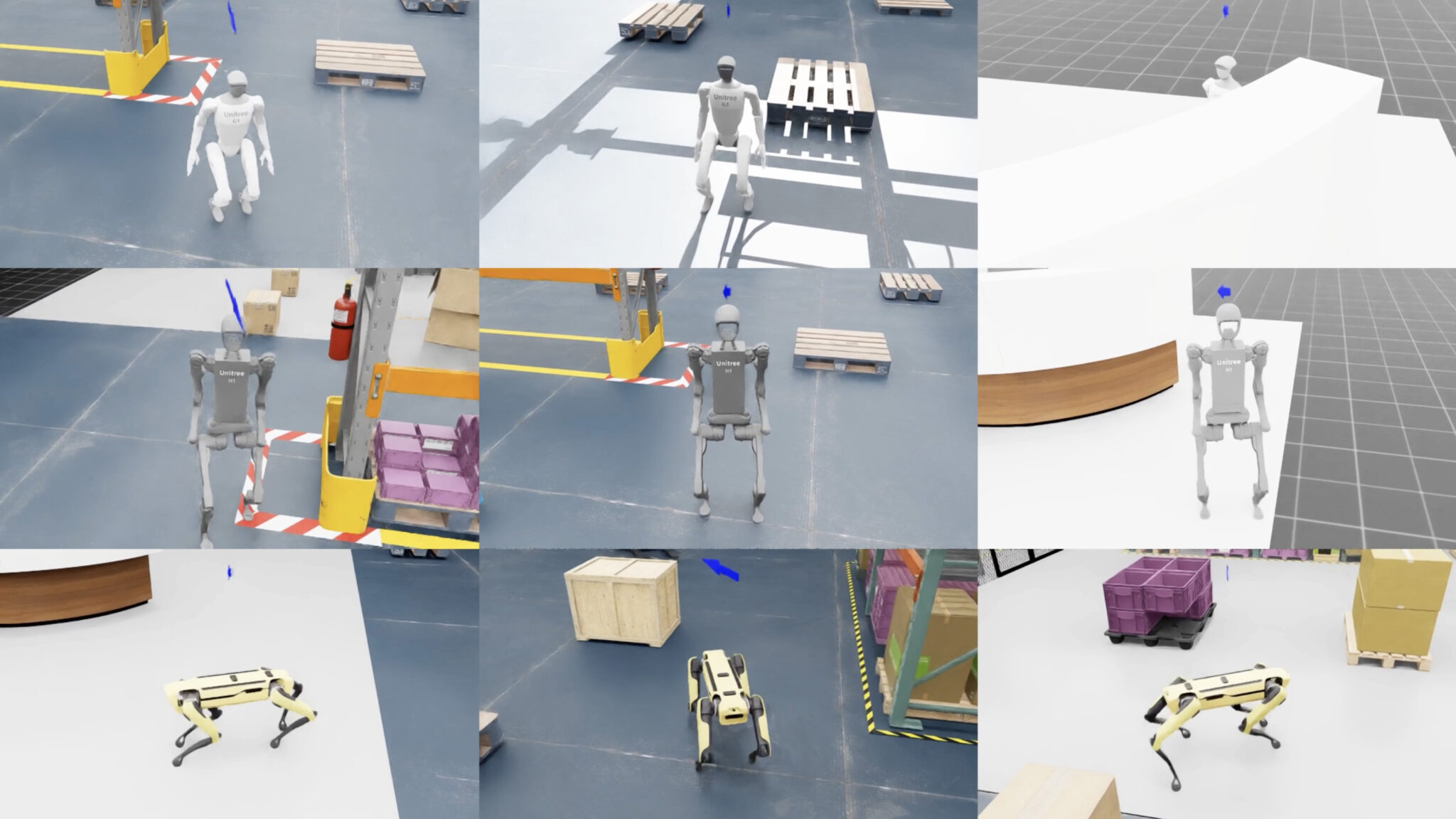
COMPASS框架通过模仿学习和强化学习,显著提高了机器人在不同形态下的导航成功率,达到80%。
-
Grasp-MPC方法通过适应性计算抓取动作,成功率从41%提高到75%。
-
Deformable Cluster Manipulation框架使机器人能够同时抓取一束柔性物体,适用于处理复杂的实际任务。
-
SPARR方法通过在实际硬件上进行二次学习,提高了精确组装的成功率,接近75%。
-
PEEK管道通过视觉语言模型帮助机器人聚焦于重要对象,提升了41倍的真实世界准确性。
-
SEAL方法在执行复杂任务时提高了15%的准确性,增强了机器人对指令的执行一致性。
-
NVIDIA还扩展了机器人研究基础设施,提供了大型开放数据集,促进物理AI研究的进展。
延伸解读
机器人技术的现实应用前景
NVIDIA的研究表明,机器人技术正逐步从模拟环境走向现实应用。这一转变不仅提高了机器人的感知和推理能力,还使其在动态环境中表现出更高的适应性。这为未来在医疗、制造等领域的实际应用奠定了基础,尤其是在需要高精度和灵活性的任务中。
新方法的成功率提升
通过COMPASS和Grasp-MPC等新方法,NVIDIA显著提高了机器人在复杂任务中的成功率。例如,COMPASS在导航任务中的成功率达到了80%,而Grasp-MPC则将抓取成功率从41%提升至75%。这些进展表明,机器人在实际操作中的可靠性正在不断增强。
多样化的机器人应用场景
NVIDIA的研究不仅关注单一任务的执行,还探索了机器人在处理复杂场景中的能力,如Deformable Cluster Manipulation框架使机器人能够同时抓取多个柔性物体。这种能力在农业、物流等领域具有广泛的应用潜力,能够提升工作效率和处理复杂任务的能力。
延伸问答
NVIDIA的研究如何推动机器人技术从模拟走向现实?
NVIDIA的研究通过新方法如COMPASS和Grasp-MPC,展示了机器人在动态环境中的感知、推理和行动能力,显著提高了成功率和适应性。
COMPASS框架的主要功能是什么?
COMPASS框架通过模仿学习和强化学习,显著提高了机器人在不同形态下的导航成功率,达到80%。
Grasp-MPC方法如何提高抓取成功率?
Grasp-MPC方法通过适应性计算抓取动作,成功率从41%提高到75%,通过实时调整机器人运动来实现更精确的抓取。
PEEK管道在机器人任务中有什么优势?
PEEK管道通过视觉语言模型帮助机器人聚焦于重要对象,提升了41倍的真实世界准确性,减少了干扰。
SPARR方法如何改善机器人组装任务的成功率?
SPARR方法通过在实际硬件上进行二次学习,改善了组装任务的成功率,接近75%,并减少了周期时间。
NVIDIA如何支持机器人研究的基础设施?
NVIDIA扩展了机器人研究基础设施,提供了大型开放数据集,促进物理AI研究的进展,支持全球的研究团队。
