
在线教程丨低门槛部署英伟达最新Physical AI模型,覆盖人形机器人/人体运动生成/扩散模型微调等
HyperAI超神经
·

2026年2月19日
Haoxiang's Blog
·

我们是否有错误的人工智能梦想?
The JetBrains Blog
·
Agent设计模式——第 21 章:探索和发现
XINDOO的博客
·
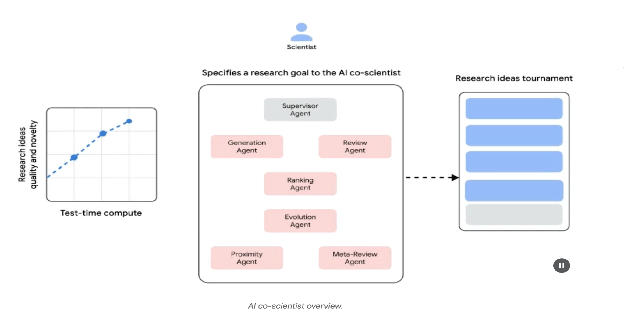
评估专家通才
Martin Fowler
·

上周人工智能动态 #303 - Gemini Robotics、Gemma 3、CSM-1B
Last Week in AI
·
引导探索以高效学习关系模型
BriefGPT - AI 论文速递
·
离散层次规划:用于层次强化学习代理的研究
BriefGPT - AI 论文速递
·
