本期节目邀请职业投资人Aaron分享他的看法,帮助学生和有学习习惯的读者学习投资思维并指导生活决策。
松弛感是与紧张相对的状态,可以应对不确定性,让大脑休息。内卷现象普遍存在,人们焦虑不敢停下来。预计下一代可以更悠闲地生活。生活需要更多松弛感,创造性工作需要这种状态。
本文探讨了Thompson Sampling算法在序贯决策中的应用,尤其是在多臂赌博机问题中的表现。该算法通过贝叶斯方法实现了对数级别的预期遗憾,并在不同环境下进行了多种改进和扩展,展示了其在探索与开发权衡中的有效性和鲁棒性。
DeepProbLog是一种结合神经网络与概率逻辑编程的语言,旨在解决机器学习中的泛化性、可解释性和数据需求问题。文章回顾了归纳逻辑编程的研究进展,介绍了新方法和系统,并探讨了当前的限制与未来的发展方向。
本文介绍了一种通过凸松弛方法拟合和分割多结构数据的技术,展示了其在图像平面提取和单应性估计中的高精度表现。研究还提出了基于体素的平面提取方法和实时平面重建模型,显著提高了点云构建的精度和效率。G3Reg框架通过提取几何原语实现激光雷达点云的快速注册,展现了卓越的稳健性和实时性能。
本文探讨了图神经网络在敌对攻击下的脆弱性,并提出了 Pro-GNN 框架以增强其稳健性。研究还介绍了新型攻击方法 DGA,显著提高了攻击效率并减少了训练时间。实验验证了对抗训练和位置编码在提升 GNN 性能方面的有效性。
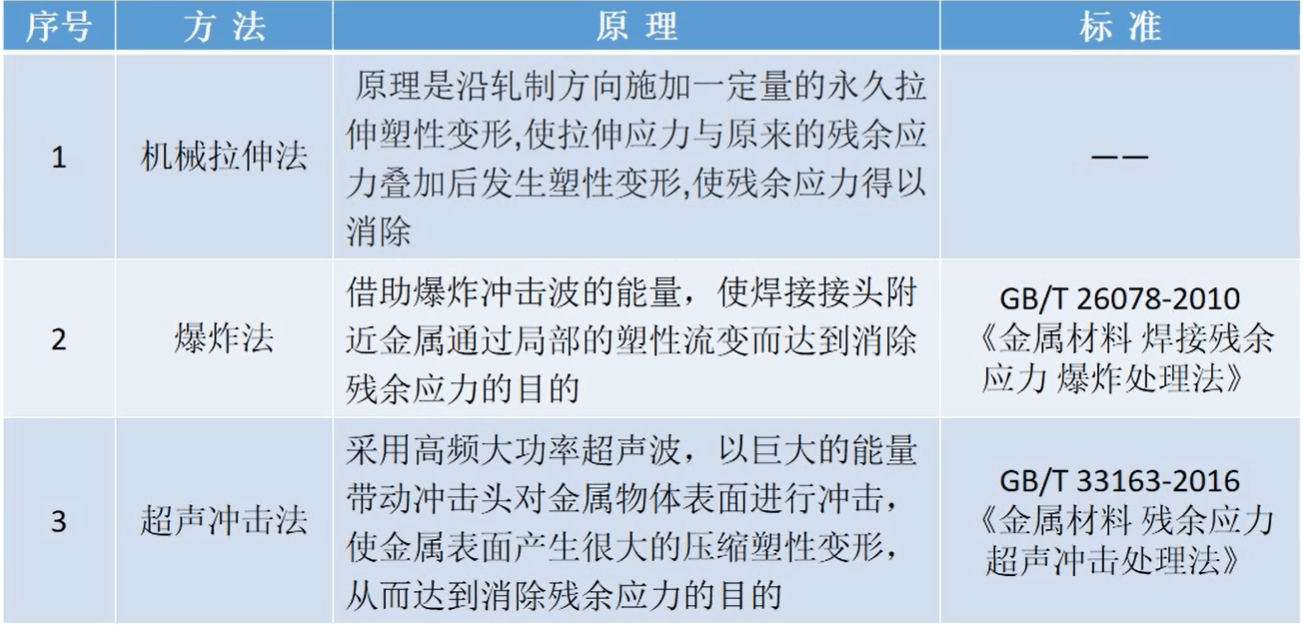
残余应力是材料内部达到自平衡状态的力,影响零件质量性能。消除残余应力的方法有自然实效、热实效和振动时效。自然实效是将工件露天放置,经过温度变化使残余应力松弛。热实效是通过热处理消除残余应力。振动时效是通过振动使材料发生微量塑性变形,从而松弛残余应力。
本文研究了采用权重衰减正则化的两层 ReLU 网络与其凸松弛之间的最优性差距,揭示了在随机训练数据情况下原问题与其松弛之间相对最优性差距可以通过 O (√log n) 的因子进行界定。此外,在合理假设下,随机初始化参数的局部梯度方法几乎必定收敛于训练损失较低点,此结果相对现有结果而言具有指数级改进,并对解释局部梯度方法为何行之有效提供了新的见解。
本文提出了一种新的对比学习框架,用于解决联邦学习中的数据异构性挑战。该框架通过分析客户端之间梯度更新的不一致性,并建立其与特征表示分布的依赖性,提出了监督式对比学习(SCL)目标来减轻局部偏差。为了防止表示坍缩并增强特征可传递性,引入了放松的对比学习损失,对过度相似的样本对施加差异惩罚。实验结果表明,该框架在标准基准上比现有的联邦学习方法更具优势。
该论文介绍了一种简单的聚类算法,基于k-means算法,不需要生成模型,只需要假定“接近条件”规律。该算法能够产生大多数现有生成模型的结果,并提出了一种新技术来提高间距与标准差之比。
2016年9月20日,我生平第一本书出版了,名字叫做《技巧——如何用一年时间获得十年的经验》。购买链接我就不列 […] 不鸡血,不躺平,永远向前,保持松弛感最先出现在Tinyfool的个人网站。
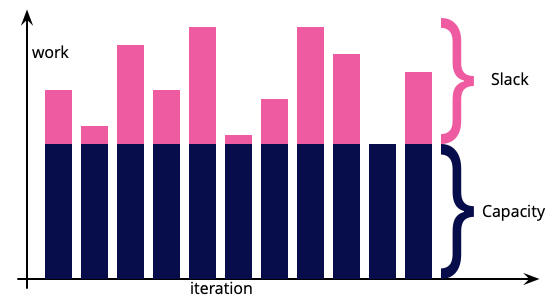
时间盒迭代的常见方法是在每个迭代中分配尽可能多的用户故事,以最大限度地利用相关人员。松弛是有意留出未分配给故事的时间,用于处理非计划工作。尽管这看起来效率低下,但通常会显著提高团队的生产力。引入松弛到计划中的一个好方法是用它来应对计划的固有不确定性。一个平均每个迭代完成20个故事的团队不会每个迭代都完成确切的数量。相反,我们会看到一个范围:比如从15到22。在这种情况下,团队可以以最低一致的数字(15)进行计划,并将额外的时间视为松弛时间。这种方法的一个好处是减少了故事完成的变异性。我们不再担心这个迭代是否能完成20个故事分配中的最后五个,而是可以有很高的信心期望完成15个。对于计划和协调来说,更高的信心通常比试图最大化吞吐量更有价值。人们常常担心松弛会导致懒散,但有很多有效利用松弛时间的方式。最明显的是作为额外的未承诺奖励处理其他故事。这不会影响较低承诺率的可预测性,但可以在可能的情况下完成更多工作。但是,做更多的故事通常不是最有效的做法。大多数团队的工作环境会受到影响而变慢。构建过程中可能存在低效,代码库中可能存在冗余
索尼A7C+FE 85mm f/1.8组合具有良好的性能,可以满足摄影爱好者的基本需求,提供足够优秀的摄影体验,而且携带方便,不会产生太多心理负担。推荐的镜头有腾龙20-40mm F/2.8 Di III VXD和索尼最新推出的小三元,定焦镜头也有不少可选,只需要根据自己的需求和使用环境,忘掉复杂的参数,重新回归到通过摄影寻找生活的乐趣上。
作者三年来追求自由职业,从摄影师向艺术家转变,拍摄商业照片,出版双子书,研究“土地情结”与“亲生命性”。在职期间观察教育公平,疫情期间感受无力,发起教育实验项目,把收入的70%捐赠给一线医护人员,最终捐赠至防性侵教育和教育公益项目。
完成下面两步后,将自动完成登录并继续当前操作。