本文介绍了一套基于.NET 6.0开发的工业级3D扫描检测系统,旨在实现高效自动检测。该系统集成运动控制与设备调度,支持PLC通信,自动采集点云数据并进行异常识别,适用于仓储和制造领域,强调稳定性和可扩展性,未来有望成为工业3D视觉检测的标准组件。
原力灵机的GeoVLA框架解决了VLA模型在非结构化环境中的空间失明问题,通过双流架构结合点云数据,提升了机器人的三维感知能力。实验表明,GeoVLA在复杂任务中的成功率显著高于传统2D模型,尤其在视角和物体尺寸变化时表现出强大的鲁棒性。
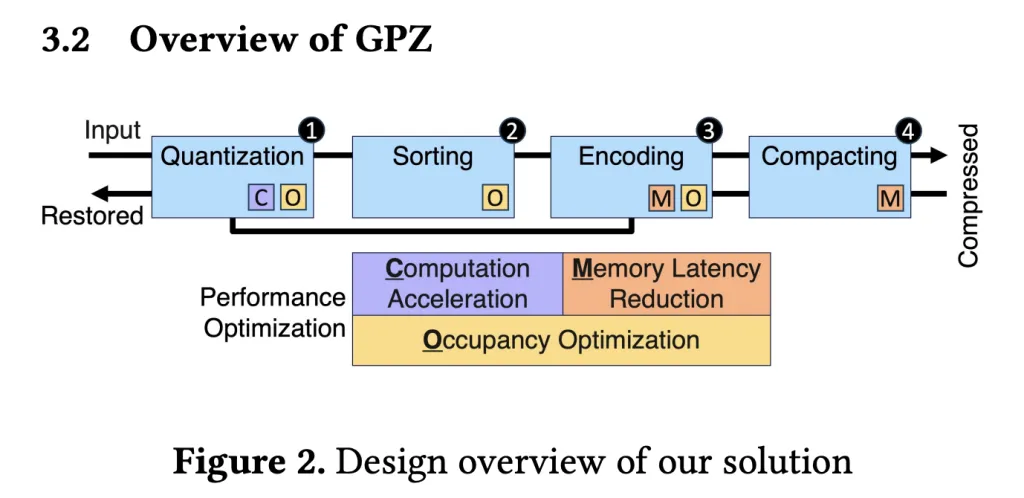
GPZ是一种针对GPU优化的有损压缩器,显著提升了粒子数据的吞吐量和压缩比,有效解决了科学领域大规模点云数据处理的难题。其设计克服了传统压缩器的局限,提供高效、低失真的数据处理方案。
在3D数据处理中,点云数据切片是管理和可视化的重要步骤。用户需创建新任务,选择点云类型并上传文件,设置参数后确认。完成后可在“服务”中预览切片数据,适用于城市规划和建筑设计等领域。
本研究提出了ImOV3D框架,旨在解决开放词汇3D物体检测中的数据稀缺问题。通过伪多模态表示,综合图像和点云数据,显著提升了检测性能。
本文提出了一种基于深度学习的神经解剖学方法,利用点云数据预测阿尔茨海默病和认知障碍。研究采用深度强化学习和几何深度学习等多种机器学习技术,显著提高了白质束的分割和预测精度。TractGeoNet框架展示了分析大脑白质纤维束与语言功能关系的潜力。
Niagara LiDAR点云插件增强虚幻引擎项目,整合LiDAR点云数据,支持沉浸式模拟和视觉效果,兼容CPU和GPU发射器,支持多种点云格式的拖放导入。
本文介绍了多种点云数据处理的新方法,如PointDAN、PoinTr和AdaPoinTr,旨在提升三维领域自适应性能。通过自适应模块、Transformer架构和几何感知块等技术,研究显示在多个数据集上取得了优异的性能,尤其在点云补全和分类任务中,显著提高了模型的泛化能力和分类准确率。
本文介绍了多种自监督学习方法用于点云数据,包括PointDAN、GAST、CrossPoint和PointMoment等。这些方法通过自适应模块、几何感知和自对比学习等技术,显著提升了点云分类和分割的性能,解决了无监督学习中的挑战。实验结果表明,这些新方法在多个基准数据集上表现优异。
本文介绍了一种名为OctField的可学习分层隐式表示方法,利用自适应八叉树结构进行形状建模和重建。该方法在处理点云数据时,能够有效重建表面,抑制幽灵几何,并支持细粒度编辑和用户控制。实验结果验证了其在3D形状插值和重构中的优越性,展示了在复杂场景中的应用潜力。
本文探讨了机器人操作中的挑战,提出了基于接触的物体表示和预训练流程,利用轻量级补丁的转换器架构处理点云数据,实现高效学习。同时引入了扩散模型和对象中心槽的3D场景生成框架,展示了在复杂环境中通过视觉模型和强化学习进行多种操作任务的有效性。
PointLLM 是一种基于大型语言模型的研究,旨在提升 3D 理解能力,处理点云数据并生成响应。采用两阶段训练策略,实验表明其在点云感知能力上优于现有 2D 基线。此外,研究提出了多种深度学习框架和方法,解决点云的语义分割和分类问题,展示了在自动驾驶等应用中的潜力。
本文介绍了一种基于学习的点云数据几何压缩方法,采用卷积变换和均匀量化,解码过程视为二元分类。该方法在多个数据集上表现优异,节省率高达51.5%。研究还提出了轻量级编码器和多尺度自动编码器,显著提高了压缩效率和编码速度,适用于低资源设备和复杂任务。
本文介绍了多种新型模型和方法在不同领域的应用,包括先验拟合网络(PFN)、零样本预测模型ForecastPFN、点云数据的联合嵌入预测架构Point-JEPA、音频的自监督学习方法A-JEPA,以及图领域的Graph-JEPA。这些方法在准确性、速度和可扩展性上表现出色,推动了各自领域的研究进展。
PointLLM是一种新型大型语言模型,旨在提升3D理解能力,通过处理点云数据生成响应。研究表明其在多模态任务中表现优异,结合图像和语言信息,推动了3D生成和理解的进展。新框架如Text4Point和Uni3D-LLM进一步提升了点云特征学习和任务性能,展示了在语义分割和物体检测中的潜力。
本文介绍了一种新的3D场景流估计架构OGSF-Net,能够更准确地预测空间流,并在Flyingthings3D和KITTI数据集中取得了先进成果。研究还提出了自监督训练方法和新型神经网络模型FlowNet3D,旨在高效处理点云数据中的场景流。实验结果显示,该方法在多个数据集上表现优异,超越了传统技术。
本文介绍了多种基于神经网络的六自由度抓取方法,利用深度学习和点云数据提高抓取成功率。研究表明,新的抓取表示法和碰撞检查模块能有效处理杂乱场景,成功率可达93%。这些方法在机器人抓取任务中显著提升了性能。
本文提出了一种基于点云数据和自监督学习的动态估计框架,旨在高效准确地估计自动驾驶汽车与其他交通参与者的相对运动状态。研究表明,该方法在自监督场景流学习方面表现优异,能够在复杂城市环境中实现安全导航。
本文介绍了一种高效的机器人抓取检测方法,利用RGBD图像和点云数据,成功率可达93%。研究提出了多种模型和方法,如PointNetGPD和RGBD-Grasp,优化了抓取配置和轨迹规划,提升了抓取的准确性和效率。实验结果表明,这些方法在实际应用中表现优异。
本文介绍了多种3D视觉领域的创新方法,如地面真值采样算法SurfaceAug和自适应转换方法AdaptPoint,这些方法显著提升了多模态目标检测的性能。同时,研究了数据增强技术在点云数据处理中的应用,改善了目标分类和分割的准确性,减少了人工标注时间,提高了模型的鲁棒性和泛化能力。
完成下面两步后,将自动完成登录并继续当前操作。