本研究提出了PC Agent-E训练框架,解决了智能体训练对高质量轨迹数据的依赖。通过合成少量人类标注的轨迹,模型性能显著提升,展现出良好的泛化能力。
本研究提出了一种新训练方法,旨在解决图形用户界面代理在高质量轨迹数据稀缺情况下的性能限制。通过中期训练阶段,利用丰富的数据和推理密集任务训练视觉语言模型,显著提升了性能,尤其在跨模态泛化方面。
DiffMove是一种新方法,旨在解决轨迹数据稀疏和不完整的问题。通过构建群体趋势图,结合个体历史和当前移动偏好,DiffMove实现了高质量的轨迹恢复。实验结果表明,该方法在真实数据集上优于现有技术,验证了其有效性和鲁棒性。
RoboMIND是一个包含5.5万条轨迹和279项任务的大规模多构型机器人数据集,旨在提升机器人在复杂环境中的操作能力,支持模仿学习模型的训练,促进通用机器人技术的发展。
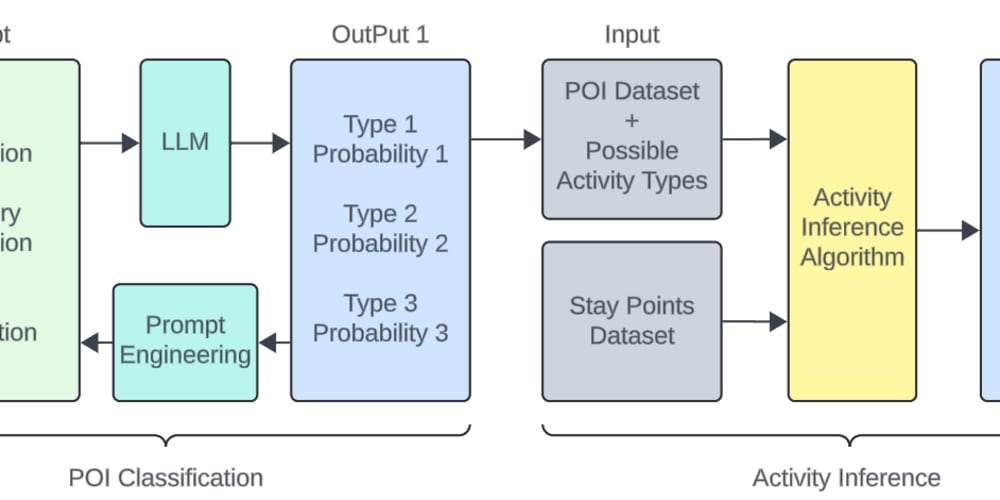
该论文介绍了一种利用大型语言模型提升兴趣点语义理解的数据挖掘框架,通过提取轨迹数据中的语义信息,增强对用户移动模式和活动的理解。该方法结合了基于LLM的POI分类和语义感知轨迹挖掘技术,可用于城市规划、交通和个性化服务等应用。
本文综述了深度学习在轨迹数据分析中的应用,探讨了卷积神经网络和循环神经网络等模型在移动性数据处理中的分类、任务和前景。研究涉及轨迹聚类、交通视频分析和自动驾驶车辆轨迹预测,强调了深度学习在预测人类行为和社交交互中的有效性,并提出了新的聚类方法和基准测试。
本研究通过模仿学习训练自主智能体在《毁灭战士2》游戏中进行游戏,发现模仿学习在摄像机运动和轨迹数据方面比强化学习更接近人类行为。智能体可以模仿真实玩家的不同游戏风格,表现出攻击性、被动性或接近人类的行为。研究提出了在视频游戏中引入更多深度和接近人类行为的方法。模仿学习智能体在数据集中表现与普通玩家相当,优于最差的玩家,但性能不如强化学习方法强。
完成下面两步后,将自动完成登录并继续当前操作。