文章讨论了异步电机的闭环控制方法,重点介绍了滑差频率控制。通过设计转速环、扭矩环和电流环,实现了对电机输出频率和电压的精确控制。同时,探讨了在无转速传感器情况下,基于阻抗法计算转速的重要性。
运放是模拟电路的基础元件,通过反馈调节实现闭环控制,避免因延迟引起的振荡。前馈补偿利用电容和电阻预测输出,确保运放的稳定性。
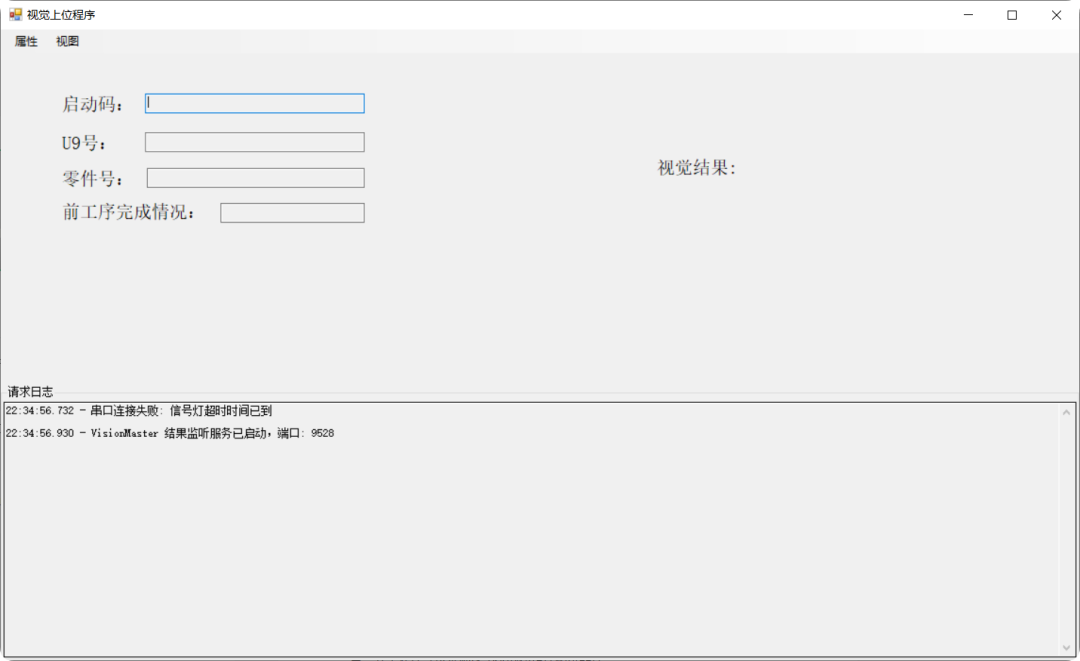
本文介绍了一个基于.NET的自动化检测系统,旨在将扫码枪与MES系统联动。操作员扫描条码后,系统自动查询工艺状态并决定是否进行视觉检测。该项目采用WinForm搭建,具备实时、可靠的闭环控制,支持串口通信和TCP/IP网络交互,显著提升了产线效率与准确性。
西湖大学吴泰霖团队提出的CL-DiffPhyCon框架有效解决了复杂系统的闭环控制问题。该方法利用异步并行去噪技术,显著提升了控制效率和效果,已被ICLR 2025接收。实验结果表明,CL-DiffPhyCon在一维Burgers方程和二维烟雾控制任务中表现优异,具有广泛的应用潜力。
本文研究了不稳定闭环非线性随机系统的最小二乘参数估计问题,提出了一种新方法,针对特定区域生成有用数据,并建立了估计误差的非渐近保证,显示出该方法在分析中的重要应用价值。
文章介绍了多种编程和系统设计风格,包括传统编译器、管道/过滤器、面向对象和事件驱动等,强调了它们的特点和应用场景,如虚拟机、规则系统和闭环控制等。
本文介绍了一种基于卷积神经网络的实时机器人抓取检测方法,性能提升高达14%,特别适用于多种抓取方式的物体。研究提出了多种改进技术,包括使用深度图像解决夹持器姿态不确定性、闭环控制器学习方法和半监督学习网络,显著提高了抓取成功率和模型准确性。
该论文提出了一种基于安全约束的贝叶斯优化算法,利用高斯过程和上下文变量实现机器人算法参数的快速优化。研究了多输出之间的复杂依赖关系,提出了自适应优化方法和闭环控制解决方案,以确保在不确定性和干扰下的安全控制。通过数值实验验证了算法的有效性,并在高维度应用中表现优越。
本文提出了一种针对非线性机器人系统的闭环控制方案,利用增量马尔可夫决策过程(iMDP)算法优化控制策略,降低跟踪偏差。同时,研究探讨了基于最大熵的强化学习方法和新的随机优化算法,强调了其在非凸环境中的收敛性及在机器人应用中的有效性。
本文研究了动态视觉传感器事件相机的控制与应用,包括参数自动调节、视觉场景匹配、行人检测及闭环控制。实验验证了不同方法的有效性和性能提升,展示了事件相机在机器人技术和图像重建中的潜力。
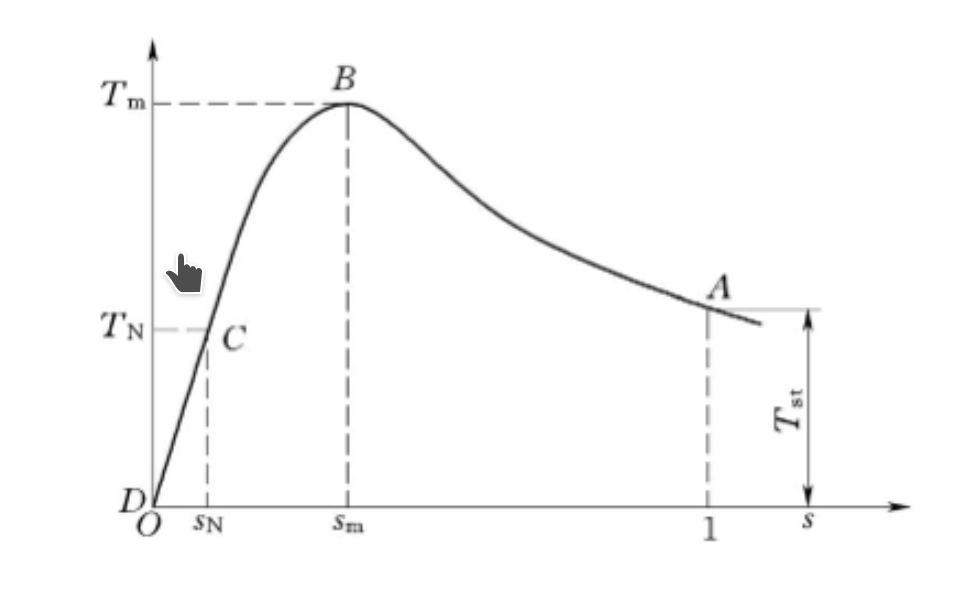
感应电机的开环控制无法调速,降低电压会导致转差增大和发热。恒压频比控制虽然简单,但无法优化电机性能。转差率闭环控制通过转速传感器实现更高效率。为降低成本,提出最大功率因素点跟踪方法,利用功率因素优化频率和电压组合,提升电机性能。
该文介绍了一种策略梯度方法,用于设计具有任意外部和内部结构的自由形态机器人。该方法通过使用原子建筑块束形成高级非参数宏结构。作者讨论了如何将该方法改进为闭环控制,并在未来实现从模拟到真实物理机器的转移。
完成下面两步后,将自动完成登录并继续当前操作。