
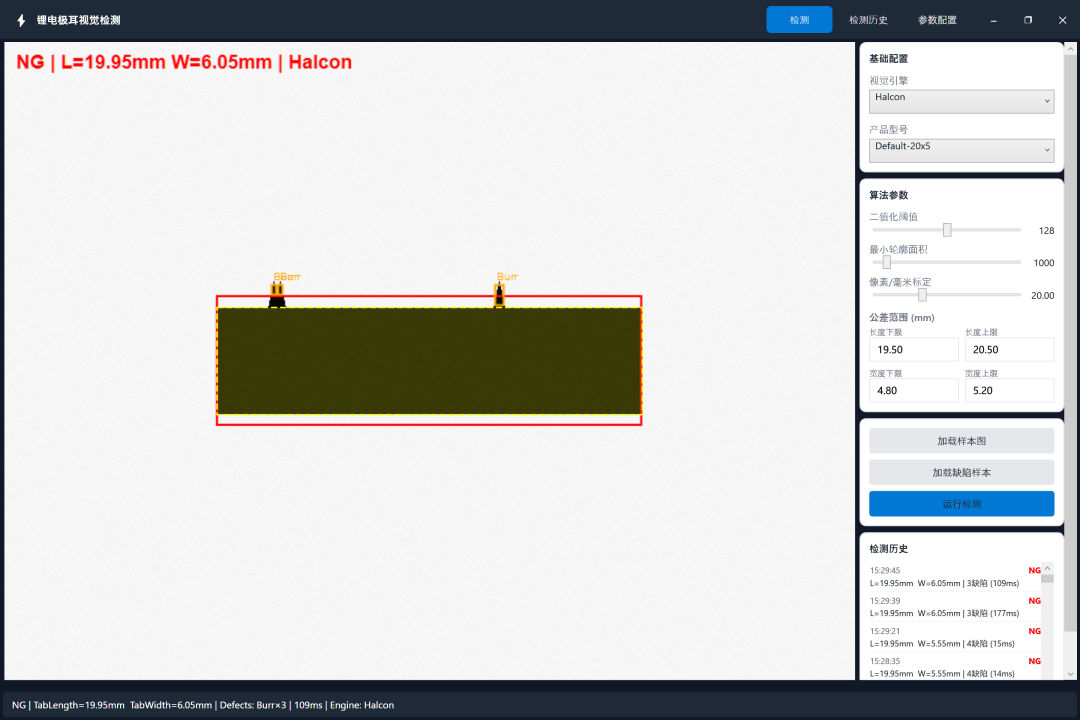
工业视觉实战 | WPF + Halcon/OpenCvSharp 的锂电池极耳视觉检测系统
dotNET跨平台
·


WPF + OpenCvSharp 搭个 OpenCV 脚手架,所见即所得玩转图像处理
dotNET跨平台
·


.NET 10 + OpenCvSharp 的摄像头无接触生命体征检测
dotNET跨平台
·
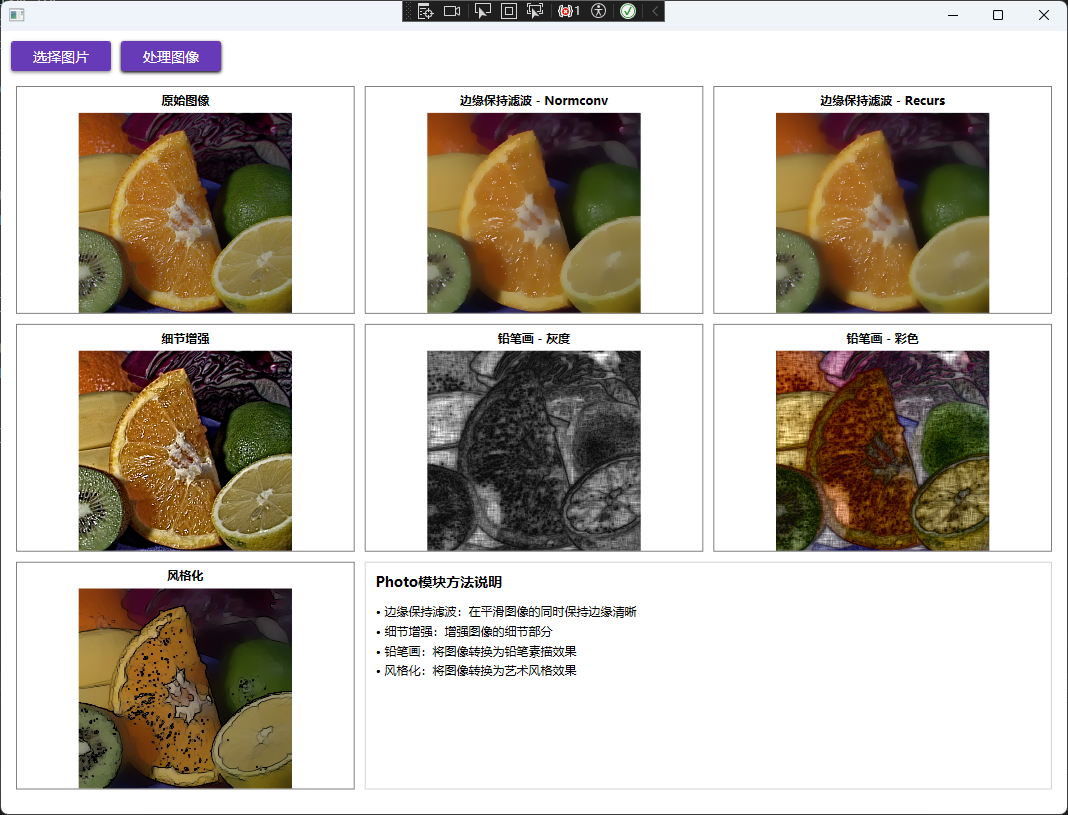
OpenCVSharp:Photo模块的使用
dotNET跨平台
·
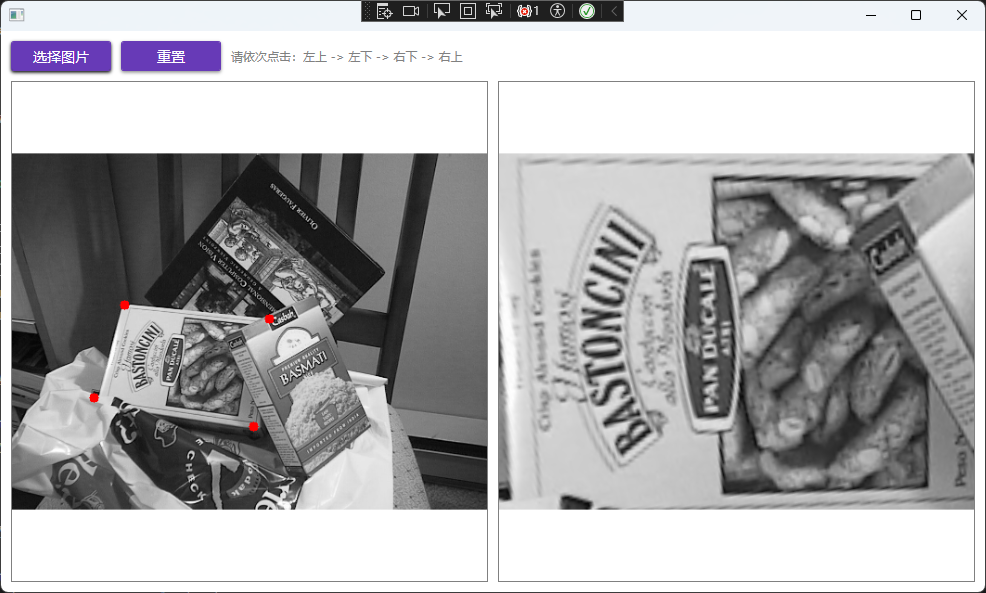
OpenCVSharp:透视变换
dotNET跨平台
·
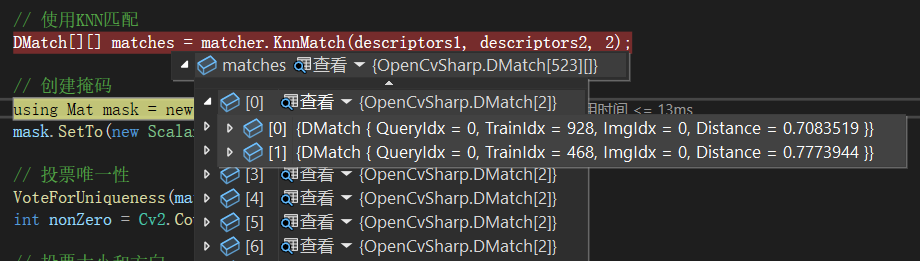
OpenCVSharp:在实际应用中使用 KAZE 算法进行特征匹配
dotNET跨平台
·
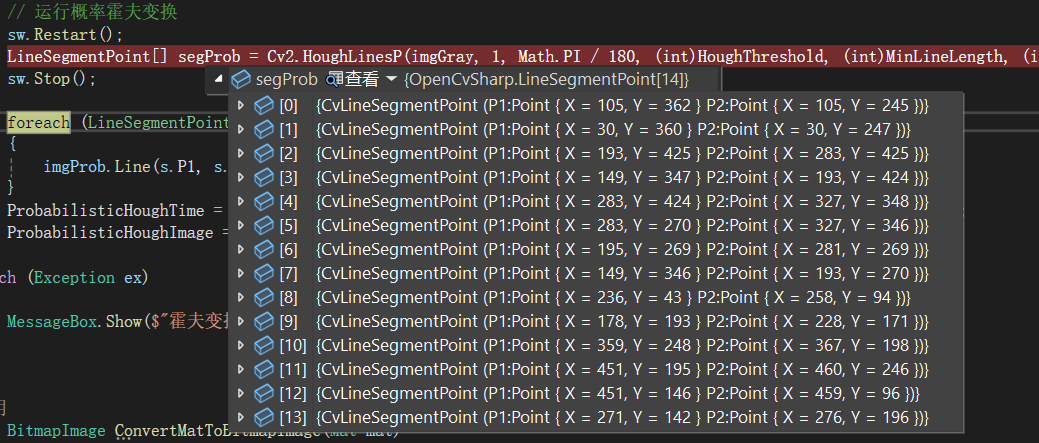
OpenCVSharp:使用霍夫变换检测直线
dotNET跨平台
·
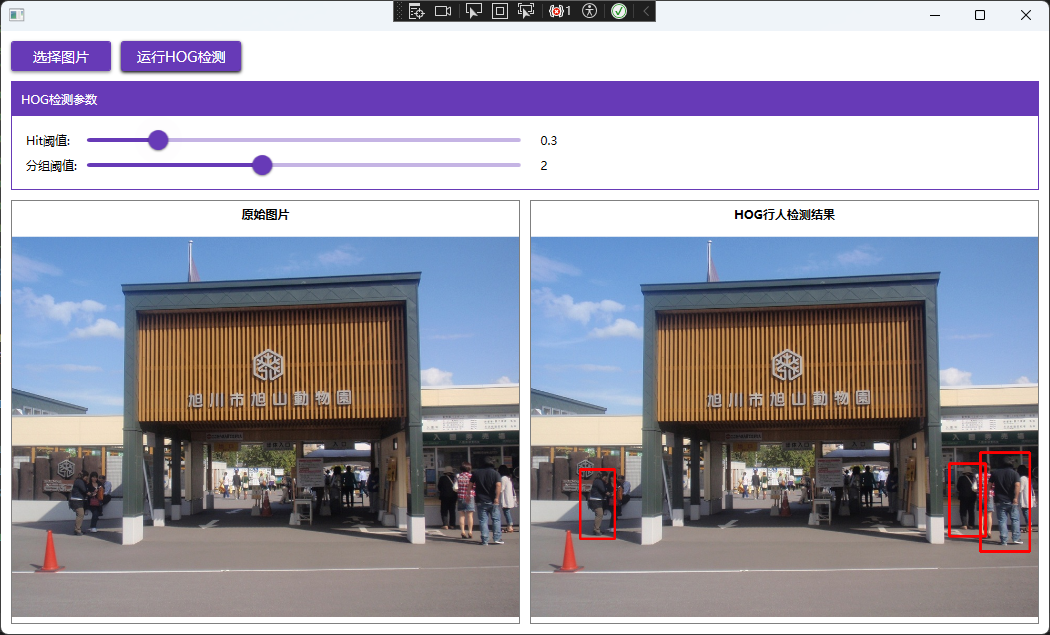
OpenCVSharp:HOG行人检测
dotNET跨平台
·
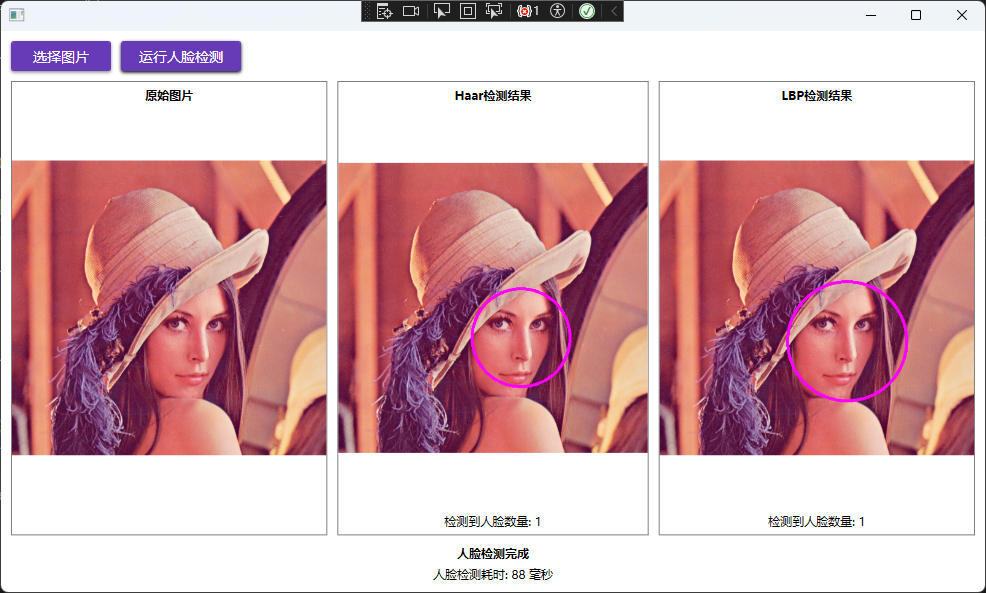
OpenCVSharp:学习人脸检测例子
dotNET跨平台
·
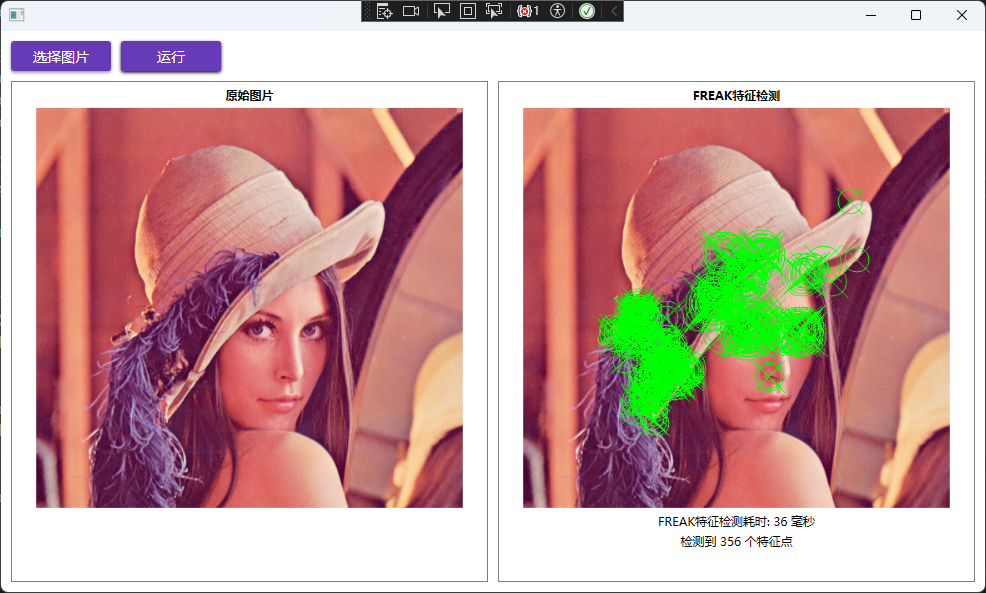
OpenCVSharp:了解几种特征检测
dotNET跨平台
·
OpenCVSharp:学习最佳匹配矩形检测
dotNET跨平台
·
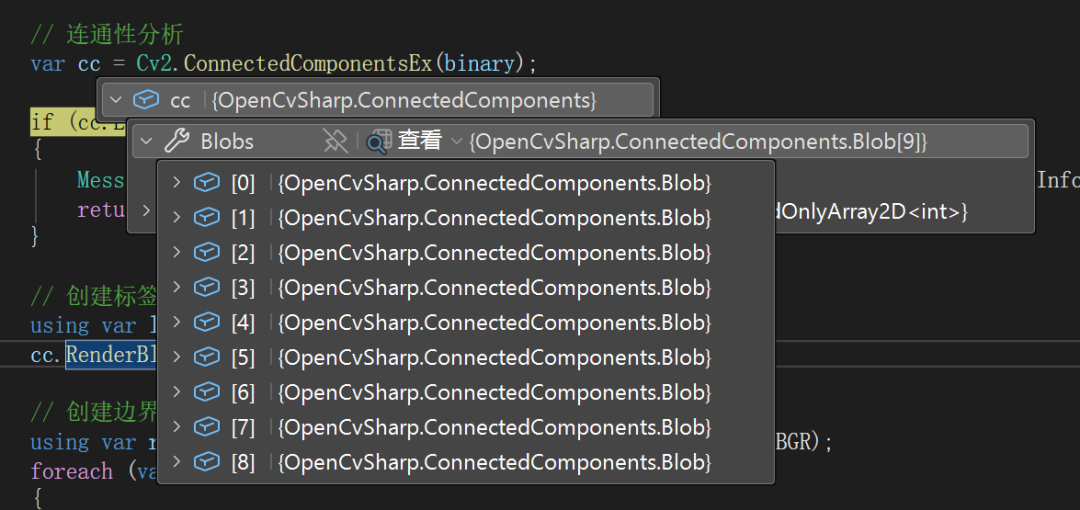
OpenCVSharp:学习连通性检测的使用
dotNET跨平台
·
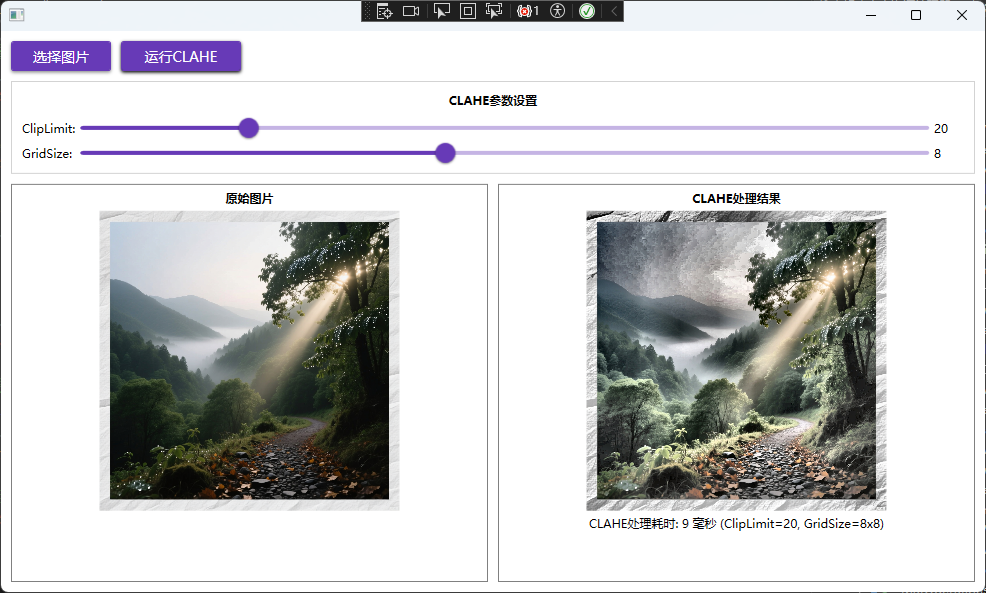
OpenCVSharp:学习CLAHE(对比度受限自适应直方图均衡化)
dotNET跨平台
·
OpenCVSharp:使用CaffeModel
dotNET跨平台
·
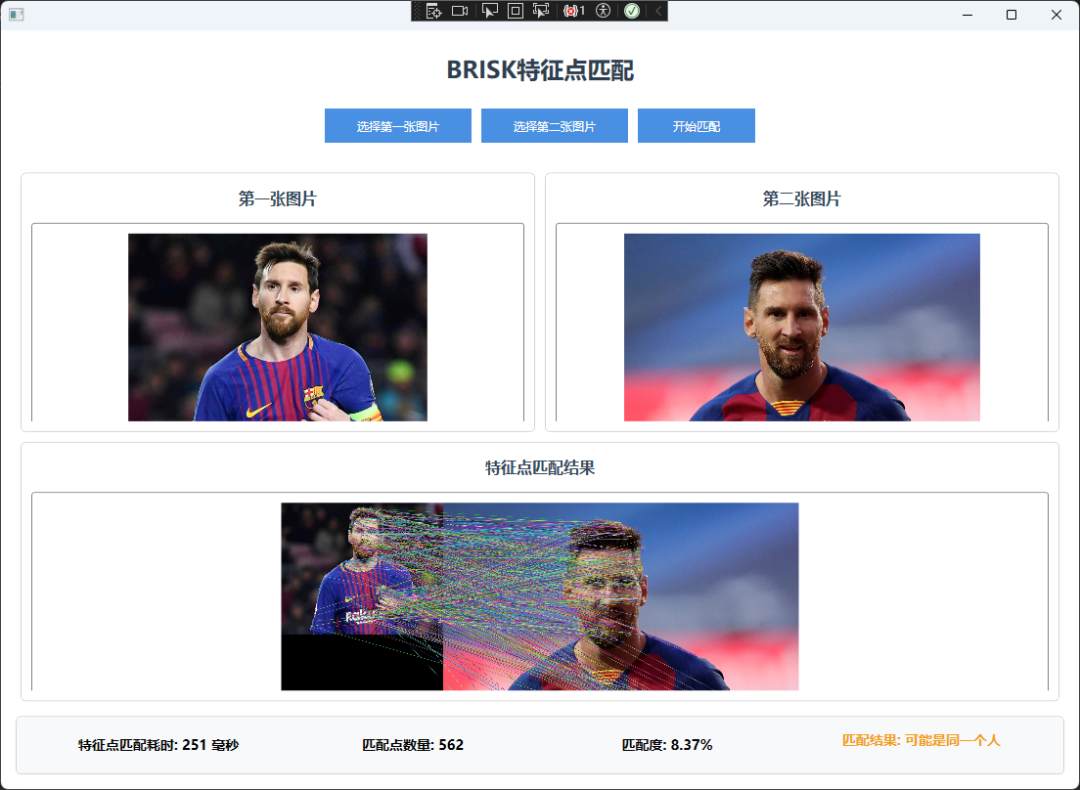
OpenCVSharp:BRISK特征检测
dotNET跨平台
·
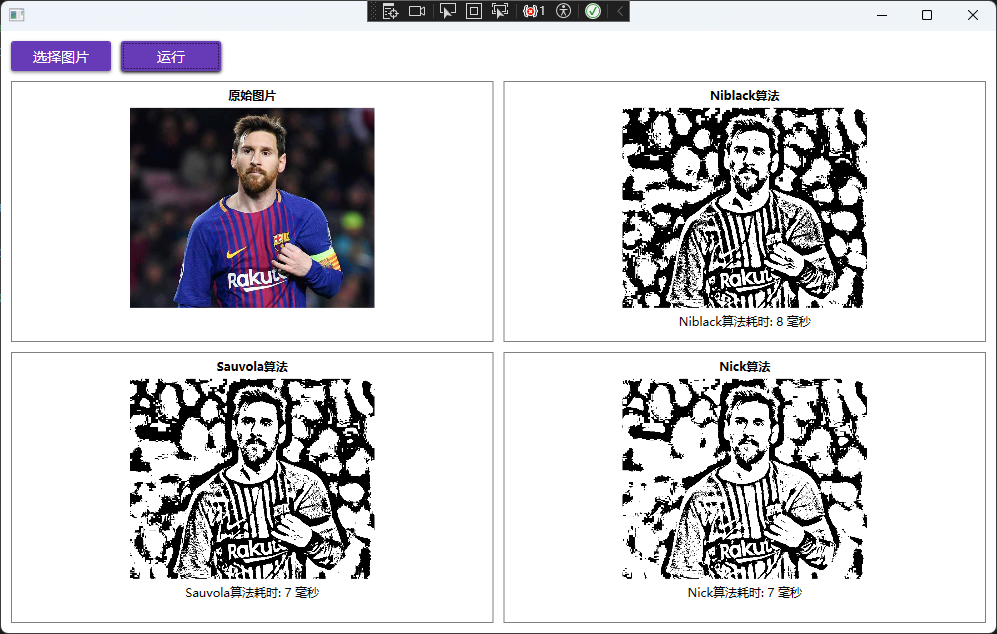
OpenCVSharp:使用三种不同的局部二值化算法
dotNET跨平台
·
OpenCVSharp:使用 MOG实现背景替换
dotNET跨平台
·
OpenCVSharp:使用MOG进行运动物体识别
dotNET跨平台
·
