
OpenCVSharp:使用三种不同的局部二值化算法
内容提要
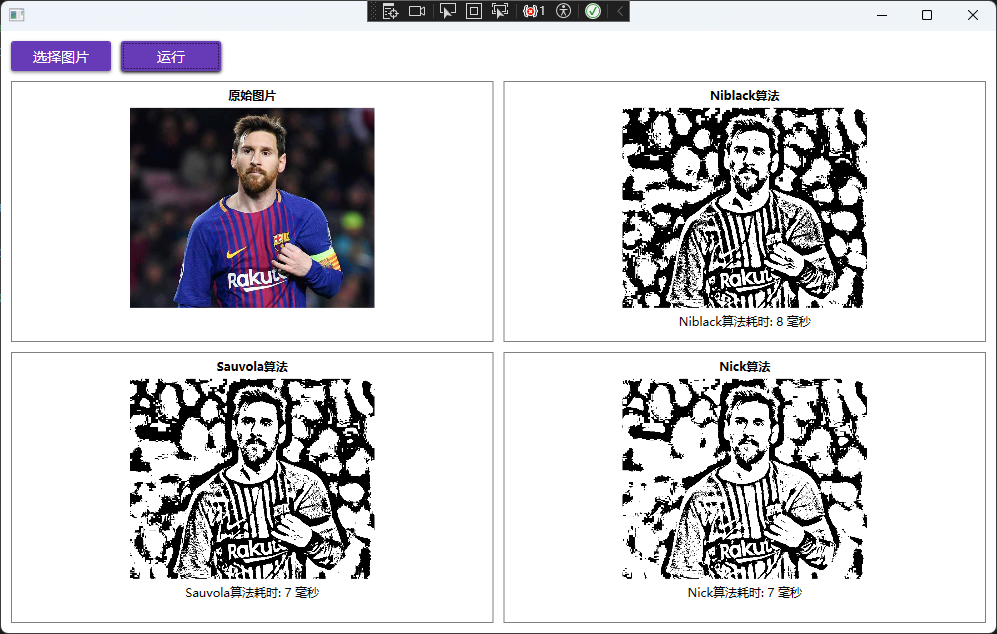
局部二值化是一种图像处理技术,通过计算每个像素邻域的统计特征动态确定阈值,从而生成二值图像。常用算法有Niblack、Sauvola和Nick,适合处理光照不均的图像。
关键要点
-
局部二值化是一种将灰度图像转换为二值图像的图像处理技术。
-
局部二值化根据每个像素周围的局部区域特征动态确定阈值,而不是使用单一阈值。
-
常用的局部二值化算法包括Niblack、Sauvola和Nick。
-
Niblack算法的阈值计算公式为T(x,y) = m(x,y) + k × σ(x,y),k通常为负值。
-
Sauvola算法的阈值计算公式为T(x,y) = m(x,y) × [1 + k × (σ(x,y)/R - 1)],k通常为正值。
-
Nick算法的阈值计算公式与Niblack相同,但实现方式和参数范围不同,k通常为负值。
-
在实际应用中,Sauvola算法通常是首选,若效果不佳可考虑Nick算法。
-
Niblack算法适合初学者学习。
-
在OpenCV中使用这三个算法非常方便,主要通过CvXImgProc.NiblackThreshold()方法实现。
-
NiblackThreshold方法根据图像局部区域的统计特性计算每个像素的阈值,适合处理光照不均匀的图像。
延伸解读
局部二值化的优势
局部二值化技术相较于全局二值化,能够更有效地处理光照不均的图像。这是因为它根据每个像素的邻域特征动态计算阈值,适应性更强,尤其在复杂环境下表现更佳。
算法选择的实用建议
在实际应用中,建议首先尝试Sauvola算法,因为它在处理噪声和对比度问题时通常效果较好。如果效果不理想,再考虑使用Nick算法并调整参数。Niblack算法适合初学者学习和理解。
OpenCV中的实现便利性
OpenCV提供了方便的接口来实现这三种局部二值化算法,用户只需调用CvXImgProc.NiblackThreshold()方法并调整参数即可。这降低了使用门槛,使得图像处理变得更加高效。
延伸问答
局部二值化是什么?
局部二值化是一种图像处理技术,用于将灰度图像转换为二值图像,通过计算每个像素邻域的统计特征动态确定阈值。
局部二值化与全局二值化有什么区别?
局部二值化根据每个像素周围的局部区域特征动态确定阈值,而全局二值化使用单一阈值处理整个图像。
常用的局部二值化算法有哪些?
常用的局部二值化算法包括Niblack、Sauvola和Nick。
Niblack算法的阈值计算公式是什么?
Niblack算法的阈值计算公式为T(x,y) = m(x,y) + k × σ(x,y),其中k通常为负值。
在OpenCV中如何使用Sauvola算法?
在OpenCV中使用Sauvola算法可以通过CvXImgProc.NiblackThreshold()方法实现,参数中k通常为正值。
为什么Sauvola算法通常是首选?
Sauvola算法通常是首选,因为它在处理光照不均的图像时效果较好,尤其是在噪声或对比度问题严重的情况下。
