
OpenCVSharp:HOG行人检测
内容提要
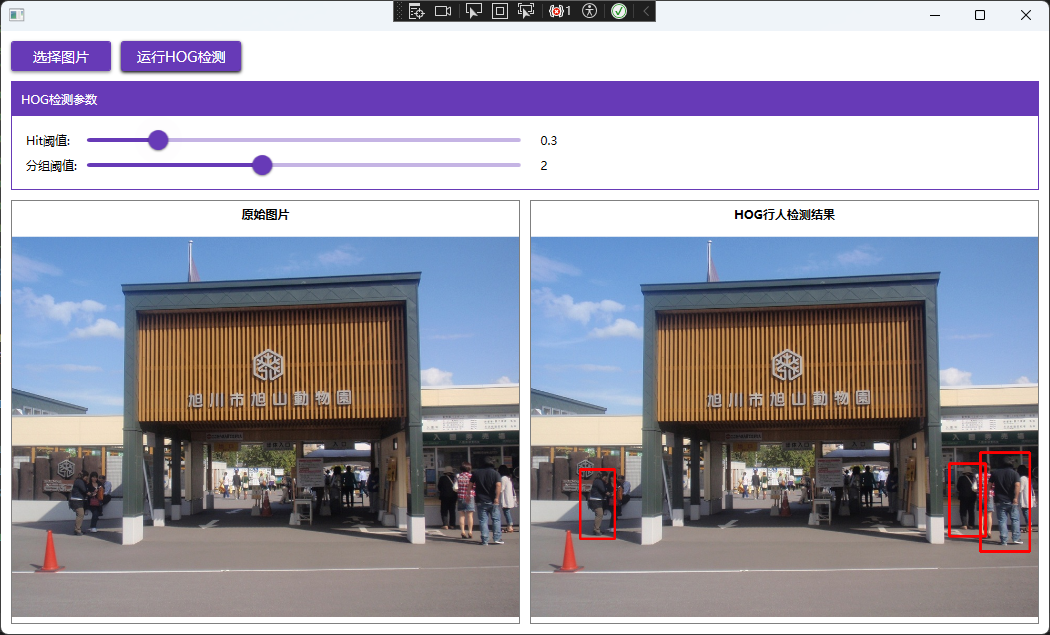
HOG行人检测是一种计算机视觉技术,通过计算图像局部区域的梯度方向直方图来识别行人。该算法将图像分割为细胞单元,生成特征向量,并利用SVM分类器进行检测,主要步骤包括读取图像、创建HOG描述符和执行多尺度检测。
关键要点
-
HOG行人检测是一种基于方向梯度直方图特征的计算机视觉目标检测技术。
-
该算法通过计算图像局部区域的梯度方向直方图来描述目标的外观形状特征。
-
图像首先被分割为细胞单元,计算每个单元内像素的梯度方向并生成直方图。
-
相邻的细胞单元组合成块并对块内的直方图进行归一化处理,形成特征向量。
-
特征向量被输入到预先训练好的SVM分类器中,以判断图像区域是否包含行人。
-
使用多尺度扫描策略在不同大小的窗口中搜索目标,实现行人的准确检测和定位。
-
读取图像时使用Cv2.ImRead方法,确保图像文件能够被正确读取。
-
创建HOG描述符并设置SVM检测器,使用HOGDescriptor类中的SetSVMDetector方法。
-
DetectMultiScale方法用于在图像中执行多尺度目标检测,适用于不同大小的目标对象。
-
参数调优建议包括调整hitThreshold、winStride、padding、scale和groupThreshold等。
延伸解读
HOG行人检测的工作原理
HOG行人检测通过分析图像的局部梯度方向来提取特征,进而识别行人。该方法将图像分割为细胞单元,生成特征向量并利用SVM分类器进行判断。这种分层特征提取方式使得HOG在复杂背景下仍能有效识别行人,适合实时监控和自动驾驶等应用场景。
参数调优的重要性
在使用HOG行人检测时,参数调优至关重要。调整hitThreshold、winStride和scale等参数可以显著影响检测的准确性和速度。例如,降低hitThreshold可以提高检测灵敏度,但可能增加误报。因此,用户需根据具体应用场景进行合理配置,以达到最佳效果。
多尺度检测的优势
HOG行人检测采用多尺度检测策略,能够在不同大小的窗口中搜索行人。这一特性使得算法在处理不同距离和角度的行人时表现出色,尤其适合动态场景下的实时检测。用户在实现时应注意窗口大小的选择,以平衡检测精度与处理速度。
延伸问答
HOG行人检测的基本原理是什么?
HOG行人检测通过计算图像局部区域的梯度方向直方图来描述目标的外观形状特征,识别行人。
如何使用OpenCVSharp进行HOG行人检测?
使用Cv2.ImRead读取图像,创建HOG描述符并设置SVM检测器,然后调用DetectMultiScale方法进行检测。
HOG行人检测中的特征向量是如何生成的?
特征向量通过将图像分割为细胞单元,计算每个单元的梯度方向直方图并进行归一化处理生成。
HOG行人检测的多尺度检测策略有什么作用?
多尺度检测策略允许在不同大小的窗口中搜索目标,从而提高行人检测的准确性和定位能力。
在HOG行人检测中,如何调整参数以提高检测效果?
可以通过调整hitThreshold、winStride、padding、scale和groupThreshold等参数来优化检测效果。
HOG行人检测使用的分类器是什么?
HOG行人检测使用的是预先训练好的支持向量机(SVM)分类器来判断图像区域是否包含行人。
