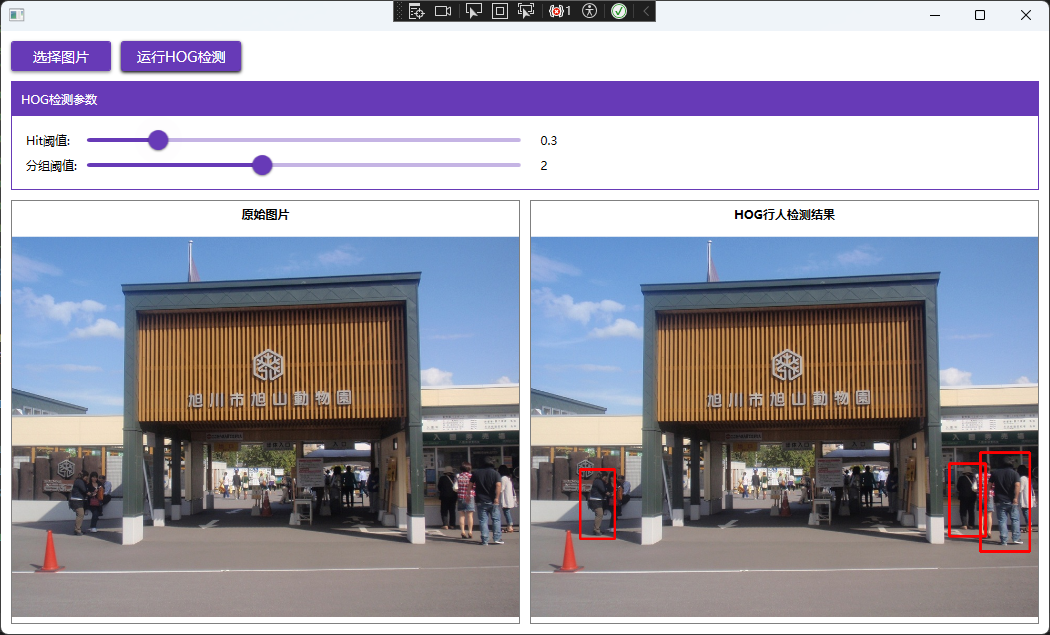
HOG行人检测是一种计算机视觉技术,通过计算图像局部区域的梯度方向直方图来识别行人。该算法将图像分割为细胞单元,生成特征向量,并利用SVM分类器进行检测,主要步骤包括读取图像、创建HOG描述符和执行多尺度检测。
该研究提出了一种基于深度学习的系统,能够以99%的准确率实时检测城市环境中的车辆和行人,利用卷积神经网络进行物体识别,旨在提升交通监控与管理效率。
本研究提出了一种结合卷积神经网络与数据融合的框架,以提高复杂交通场景中对车辆和行人的检测效率。结果表明,该模型在不同交通条件下的测量误差不显著。
本研究提出了一种混合注意力机制(HA)和改进的RGB-T融合算法,以解决RGB-热成像行人检测中的部分重叠和传感器失效问题。实验结果表明,该方法在现实世界条件下优于现有技术。
本文探讨了多鱼眼相机系统的标定与处理,应用于自动泊车场景。研究提出了一种基于图像输入的停车位检测算法,利用YOLOv4和新型边界框模型实现高效分类,并通过协同感知网络提升环境感知性能,特别是在行人检测方面,展示了基础设施辅助的优势。
本研究探讨了行人检测技术的进展,指出现有检测器在跨数据集评估中的不足,并提出通过合成数据和创新数据集来提升性能的方法。同时,研究介绍了基于在线地图的行人检测系统和事件相机在交通监控中的应用,旨在提高交通安全和实时事故检测的效率。
本文提出了一种新方法“亮通道先验关注”,结合图像增强与检测,改善低光条件下的行人检测。通过自注意力增强模块和检测模块,强化行人特征表示,提升检测性能。同时,比较了不同卷积网络架构,并提出基于多任务学习的框架,利用深层卷积神经网络和感知权重机制,优化多光谱行人检测。
本研究提出了MBNet多光谱行人检测模型,利用多模态融合技术在KAIST和CVC-14数据集上实现了优异的检测性能,尤其在恶劣光照条件下表现突出,并显著提高了行人检测的准确性。
本文介绍了一种新型深层模型,通过多任务联合优化行人检测和语义任务,显著提升了在Caltech和ETH数据集上的表现。研究还利用生成对抗网络(GAN)生成合成数据,以解决“危险行人”数据不足的问题,并提出了动态轨迹预测器(DTP)以提高行人轨迹预测的准确性。
本研究提出了多种行人检测方法,包括基于对比学习的示例字典、深度学习架构、跨模态学习和多摄像头组合检测,旨在提高检测精度和效率,尤其在低光和人群密集情况下表现优异。实验结果表明,所提方法在多个数据集上取得了先进性能。
本文介绍了一种基于事件相机和深度神经网络的实时物体追踪方法,优于传统方法。研究提出了Gamma-Net结构,提升了轮廓检测的样本效率,并探讨了深度神经网络在视觉追踪中的应用。该算法在多个基准测试中表现出色,并提出了针对小尺度目标的行人检测方法和热红外跟踪器HSSNet,均取得良好性能。
本文研究了动态视觉传感器事件相机的控制与应用,包括参数自动调节、视觉场景匹配、行人检测及闭环控制。实验验证了不同方法的有效性和性能提升,展示了事件相机在机器人技术和图像重建中的潜力。
本文提出了一种基于局部斯特林核的多维模板形式的中级属性,用于检测远红外图像中的行人。同时引入了一种新的图像相似度核,以在支持向量机的最大边缘框架内进行训练。采用多通道离散傅里叶变换替代滑动窗口法进行行人定位,取得了良好的实验结果。
完成下面两步后,将自动完成登录并继续当前操作。