
具身智能资源汇总:机器人学习数据集,在线体验世界建模模型,英伟达/字节/小米等最新研究论文……
内容提要
本文探讨了具身智能的研究及其在物理世界中的应用,强调通过与环境互动形成智能。推荐了一系列高质量数据集、在线教程和论文,涵盖机器人学习、视觉问答等领域,以支持学习与研究。
关键要点
-
本文探讨具身智能及其在物理世界中的应用,强调智能通过与环境互动形成。
-
具身智能强调Agent与环境的交互,智能嵌入传感器、执行器和长期学习中。
-
具身智能成为全球科技巨头与研究机构关注的方向,涉及机器人、自动驾驶等领域。
-
推荐了一系列高质量数据集、在线教程和论文,支持学习与研究。
-
数据集推荐包括BC-Z、DexGraspVLA、EgoThink、EQA和OmniRetarget,涵盖机器人学习和视觉问答等。
-
教程推荐包括HY-World 1.5和vLLM+Open WebUI,涉及交互式世界建模和大型语言模型。
-
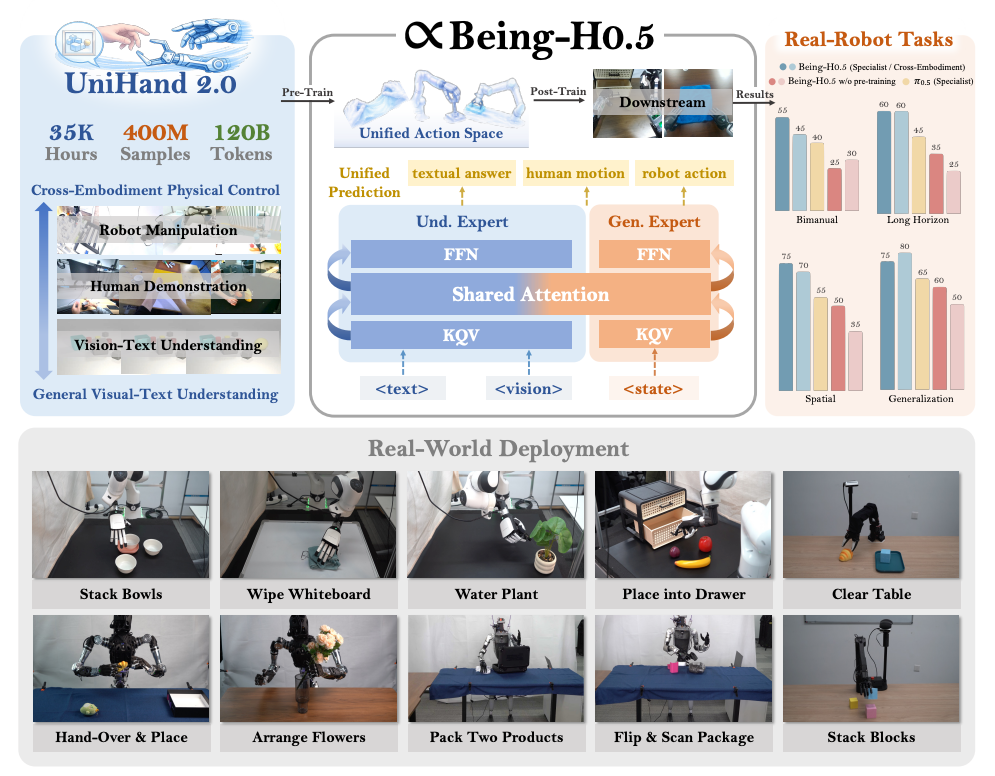
论文推荐包括RBench、Being-H0.5、Fast-ThinkAct、JudgeRLVR和ACoT-VLA,涵盖机器人视频生成、跨平台学习和推理框架等。
-
HyperAI启动内测体验计划,邀请用户体验平台能力并提供反馈。
延伸解读
具身智能的研究生态
具身智能的研究不仅仅依赖于单一模型或算法,而是形成了一个由数据集、仿真环境、基准任务和系统性方法构成的复杂生态。这种生态系统的建立为研究人员提供了多样化的工具和资源,促进了跨领域的合作与创新。
数据集的重要性
本文推荐的高质量数据集如BC-Z和DexGraspVLA,能够为机器人学习和视觉问答等领域提供丰富的训练素材。这些数据集的多样性和高质量将直接影响模型的训练效果和泛化能力,研究者在选择数据集时应考虑其适用性和代表性。
技术趋势与挑战
随着具身智能的快速发展,技术巨头和研究机构正加大对这一领域的投入。然而,如何在真实环境中实现有效的学习与适应仍然是一个重大挑战。研究者需要关注模型的可扩展性和在复杂环境中的表现,以应对未来的应用需求。
延伸问答
具身智能的定义是什么?
具身智能强调智能体与环境的交互,通过感知、决策和行动的闭环形成智能。
具身智能在物理世界中的应用有哪些?
具身智能应用于机器人、自动驾驶等领域,强调与环境的互动和学习能力。
有哪些推荐的具身智能数据集?
推荐的数据集包括BC-Z、DexGraspVLA、EgoThink、EQA和OmniRetarget,涵盖机器人学习和视觉问答等。
具身智能的研究生态系统包含哪些元素?
具身智能的研究生态系统包括数据集、仿真环境、基准任务和系统性方法。
有哪些在线教程可以学习具身智能?
推荐的在线教程包括HY-World 1.5和vLLM+Open WebUI,涉及交互式世界建模和大型语言模型。
具身智能的未来发展方向是什么?
具身智能的未来发展将集中在提升智能体在真实环境中的学习能力和交互能力。
