
基于模拟的管道为灵巧机器人定制训练数据
内容提要
MIT的PhysicsGen系统通过模拟和优化,帮助机器人高效学习物体操作技能,将少量人类演示转化为数千个模拟训练数据,提升任务执行能力。未来,该系统有望扩展到多样化任务,并利用互联网视频生成丰富的训练数据。
关键要点
-
MIT的PhysicsGen系统通过模拟和优化,帮助机器人高效学习物体操作技能。
-
该系统将少量人类演示转化为数千个模拟训练数据,提升任务执行能力。
-
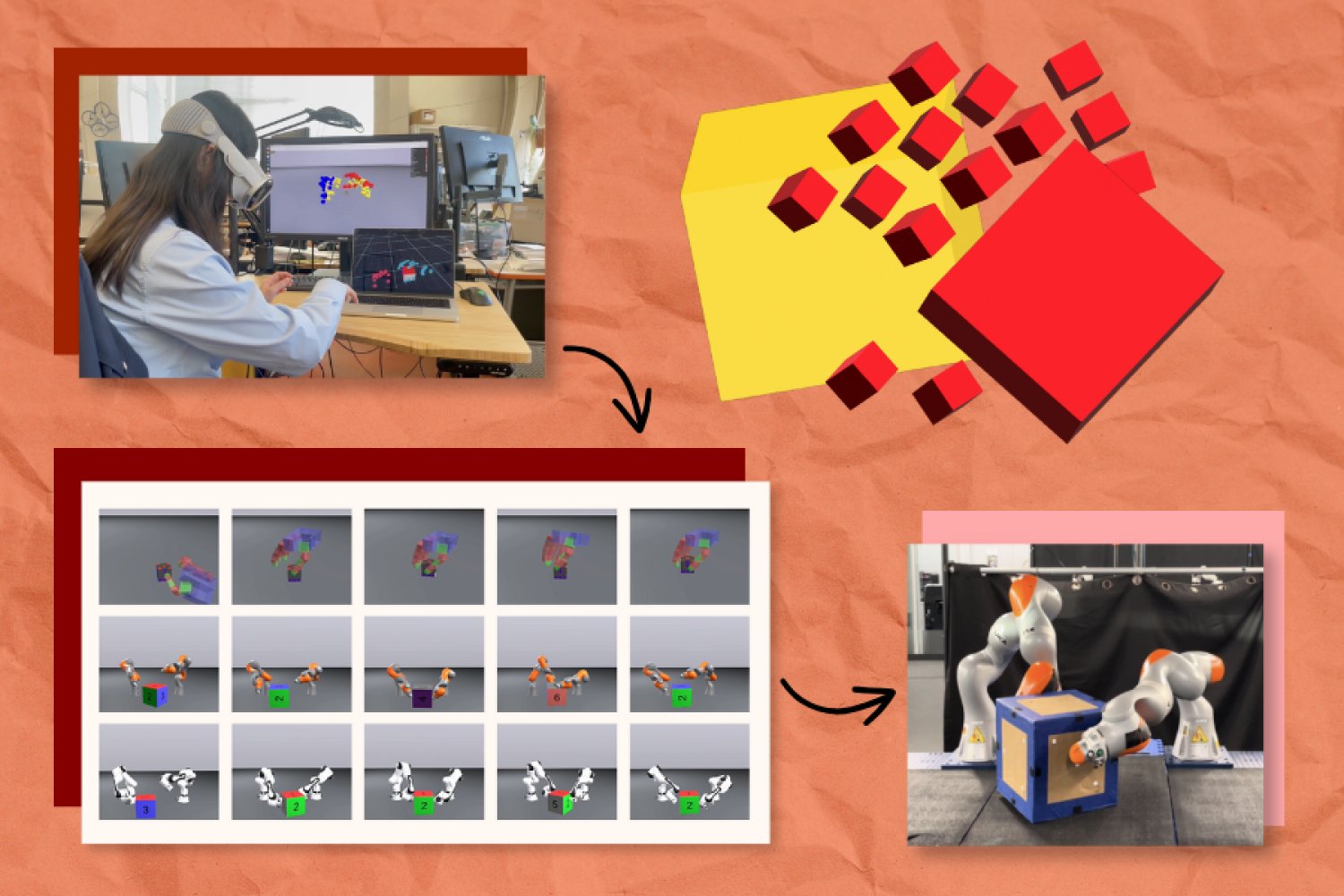
PhysicsGen通过三步过程生成特定机器人的训练数据,包括跟踪人类操作、映射到3D模型和轨迹优化。
-
该系统能够生成多样化的任务指令,帮助机器人在不同环境中执行任务。
-
PhysicsGen的实验显示,机器人在执行任务时的准确率提高了60%。
-
研究人员计划将PhysicsGen扩展到更多任务,并利用互联网视频生成丰富的训练数据。
-
未来,PhysicsGen可能帮助机器人处理更复杂的物体,如软性物品和可变形物体。
延伸解读
模拟训练的优势
MIT的PhysicsGen系统通过模拟生成大量训练数据,显著提高了机器人的任务执行能力。与传统的人工演示相比,这种方法不仅节省了时间,还能为不同类型的机器人提供量身定制的训练数据,提升其在复杂环境中的适应能力。
未来的应用潜力
PhysicsGen的未来应用前景广阔,研究人员计划将其扩展到更多任务,如教机器人执行未曾示范的动作。这种能力将使机器人在家庭和工业环境中更灵活地处理各种物体,推动智能机器人技术的发展。
数据生成的挑战
尽管PhysicsGen展示了强大的数据生成能力,但将其应用于软性和可变形物体仍面临挑战。研究人员需要进一步探索如何有效模拟这些复杂的物理交互,以便机器人能够在更广泛的场景中执行任务。
延伸问答
PhysicsGen系统是如何帮助机器人学习物体操作技能的?
PhysicsGen系统通过模拟和优化,将少量人类演示转化为数千个模拟训练数据,帮助机器人高效学习物体操作技能。
PhysicsGen的训练数据生成过程包括哪些步骤?
生成过程包括跟踪人类操作、映射到3D模型和轨迹优化三个步骤。
使用PhysicsGen系统后,机器人的任务执行准确率提高了多少?
实验显示,机器人的任务执行准确率提高了60%。
未来PhysicsGen系统的扩展计划是什么?
研究人员计划将PhysicsGen扩展到更多任务,并利用互联网视频生成丰富的训练数据。
PhysicsGen如何处理不同类型的机器人?
PhysicsGen能够生成特定机器人的训练数据,并将旧数据转化为新机器人的有用指令。
PhysicsGen系统的潜在应用场景有哪些?
该系统可以帮助机器人在仓库中协作搬运物品,或在家庭中完成如放置杯子等任务。
