亚马逊的OmniRetarget机器人在没有视觉感知的情况下成功完成复杂跑酷动作,展示了其在物体操作和地形交互方面的能力。该技术通过优化人类示范动作,提升了机器人的灵活性和效率。
MIT的PhysicsGen系统通过模拟和优化,帮助机器人高效学习物体操作技能,将少量人类演示转化为数千个模拟训练数据,提升任务执行能力。未来,该系统有望扩展到多样化任务,并利用互联网视频生成丰富的训练数据。
本研究提出FLEX框架,旨在解决物体操作中的持续接触挑战,特别是技能泛化问题。通过将机器人与物体解耦,该框架在力空间中学习操作策略,显著提高了训练效率,适用于多种机器人平台和物体类型。
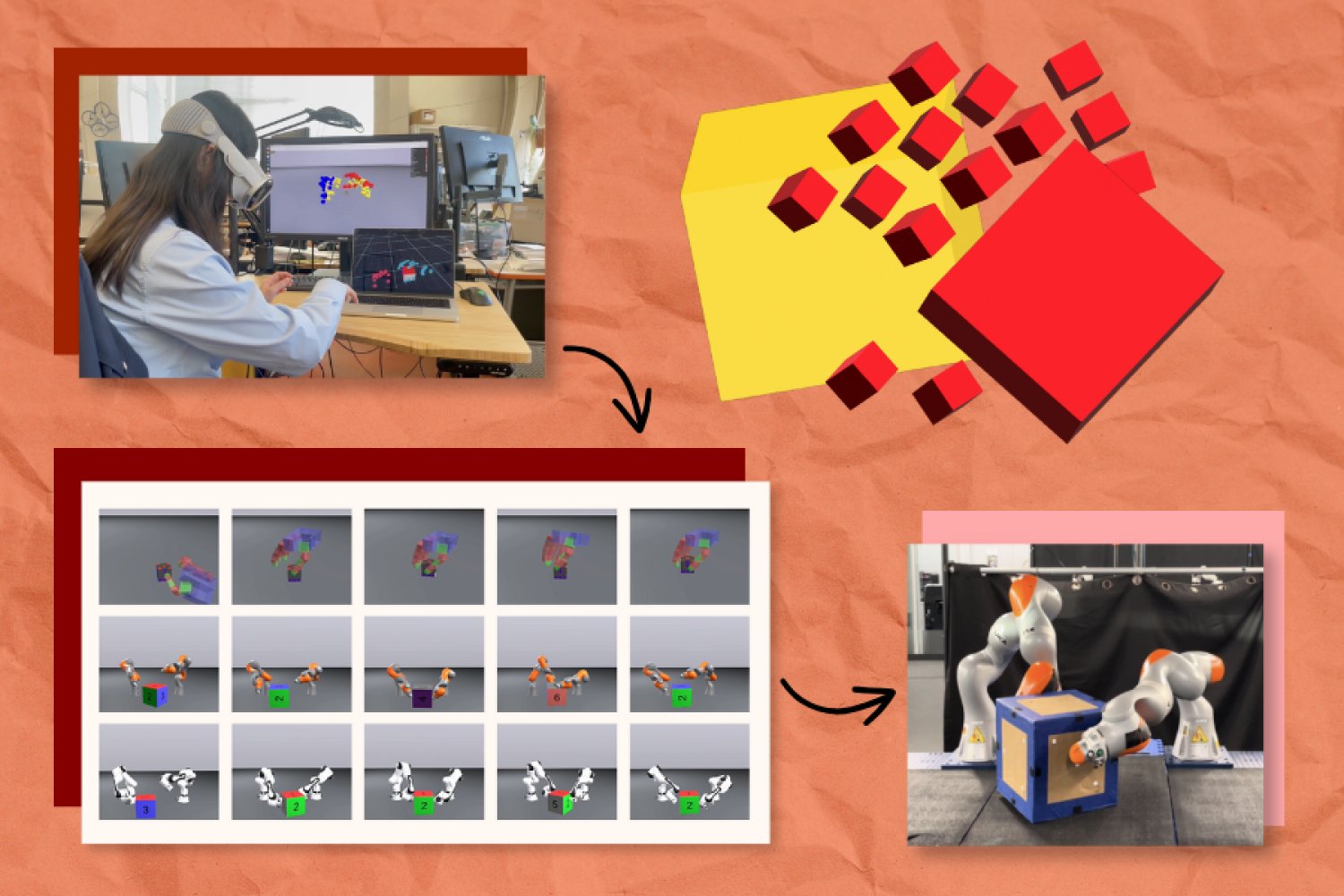
本研究提出了一种基于大型语言模型的虚拟现实搬运工具,旨在自然支持物体操作。该工具理解用户语音指令,提升用户体验和多物体操作表现,减少工作负担和手臂疲劳,为未来物体操作界面设计提供重要启示。
本文研究基于AI2-THOR框架的物体操作,提出ArmPointNav挑战,涉及3D障碍物避免和多物体操作。研究表明,手心视角提升训练效率,软硬注意机制增强机器人操控能力。通过视觉-语言模型开发的MOO方法,实现自然语言指令的目标提取,并在真实环境中展现良好的泛化能力。
本文介绍了一种名为HACMan的强化学习方法,旨在实现六自由度物体的高效操作。该方法通过层次化强化学习成功完成98%的实验任务,并提出了基于大型语言模型的混合控制方法及用于复杂动态操作任务的学习框架,展示了在多种实际操作中的优越性能。
完成下面两步后,将自动完成登录并继续当前操作。