
Meta AI 发布 Sparsh:首个基于视觉的触觉传感通用编码器
内容提要
Meta AI推出了首个视觉触觉传感通用编码器Sparsh,旨在克服传统触觉传感器的局限性。Sparsh采用自监督学习,减少对标记数据的依赖,适应多种传感器并在多任务中表现出色,提升了机器人在物理交互中的灵活性和性能。
关键要点
-
触觉传感在机器人技术中至关重要,帮助机器人了解环境并与之互动。
-
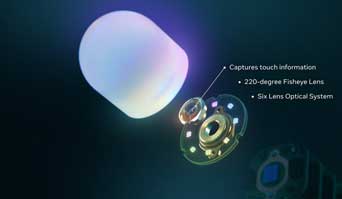
传统触觉传感器面临形状、光照和表面标记的挑战,难以构建通用解决方案。
-
Meta AI推出了首个视觉触觉传感通用编码器Sparsh,旨在克服传统模型的局限性。
-
Sparsh采用自监督学习,利用超过46万张无标签触觉图像进行训练,减少对标记数据的依赖。
-
Sparsh基于多种先进的自监督学习模型,能够泛化到不同类型的传感器并在多个任务中表现出色。
-
Sparsh框架包括TacBench基准测试,评估其在触摸相关任务中的表现,显示出显著的性能提升。
-
Sparsh在机器人和人工智能中具有重要意义,改善物理交互和灵活性,推动高级应用的发展。
-
Meta推出Sparsh标志着通过AI推进物理智能的重要一步,提供更有效的触觉应用开发途径。
延伸解读
自监督学习的优势
Sparsh采用自监督学习技术,显著减少了对标记数据的依赖。这一创新使得训练过程更加高效,尤其是在数据获取困难的情况下,能够利用大量无标签数据进行学习,推动了触觉传感器的应用潜力。
多任务适应性的重要性
Sparsh的设计使其能够在多种任务中表现出色,如力估计和滑动检测。这种多任务适应性不仅提升了机器人的灵活性,还为未来的复杂应用提供了基础,尤其是在需要精确物理交互的场景中。
与传统模型的比较
与传统触觉传感器模型相比,Sparsh在性能上有显著提升,平均提高了95%。这种优势使得Sparsh在实际应用中更具竞争力,尤其是在需要快速适应不同环境和任务的情况下。
延伸问答
Sparsh是什么?
Sparsh是Meta AI推出的首个基于视觉的触觉传感通用编码器,旨在克服传统触觉传感器的局限性。
Sparsh如何减少对标记数据的依赖?
Sparsh利用自监督学习,训练时使用超过46万张无标签触觉图像,从而减少对标记数据的需求。
Sparsh在触觉传感器中的应用有哪些?
Sparsh可以应用于力估计、滑动检测、姿势估计、抓握稳定性、纺织品识别和灵巧操作等任务。
Sparsh的性能如何与传统模型相比?
Sparsh在基准测试中表现出显著的性能提升,平均提高95%,同时仅需33-50%的标记数据。
Sparsh对机器人技术的影响是什么?
Sparsh改善了机器人的物理交互和灵活性,为更高级的应用如手部操作和灵巧规划铺平了道路。
Meta推出Sparsh的意义是什么?
Meta推出Sparsh标志着通过AI推进物理智能的重要一步,旨在为机器人和AI构建可扩展的触觉解决方案。
