

戴盟机器人提供具身智能一站式解决方案
全球TMT-美通国际
·
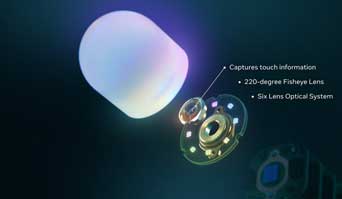

光纤束微型化基于视觉的触觉传感器用于紧凑型机器人
DEV Community
·

不像人也不像狗,腾讯最新家用机器人有点「离经叛道」
机器之心
·
机器人手掌模拟人类触感
MIT News - Computer Science and Artificial Intelligence Laboratory (CSAIL)
·
