
教机器人绘制大规模环境地图
内容提要
麻省理工学院的研究人员开发了一种利用机器学习生成复杂场景3D地图的新系统。该系统通过生成小子地图并拼接,实时估计机器人位置,适用于搜索救援和工业应用,且在准确性和速度上优于传统技术。
关键要点
-
麻省理工学院的研究人员开发了一种利用机器学习生成复杂场景3D地图的新系统。
-
该系统通过生成小子地图并拼接,实时估计机器人位置。
-
该技术适用于搜索救援和工业应用,准确性和速度优于传统技术。
-
传统的同时定位与地图构建(SLAM)方法在复杂场景中表现不佳,且需要预先校准相机。
-
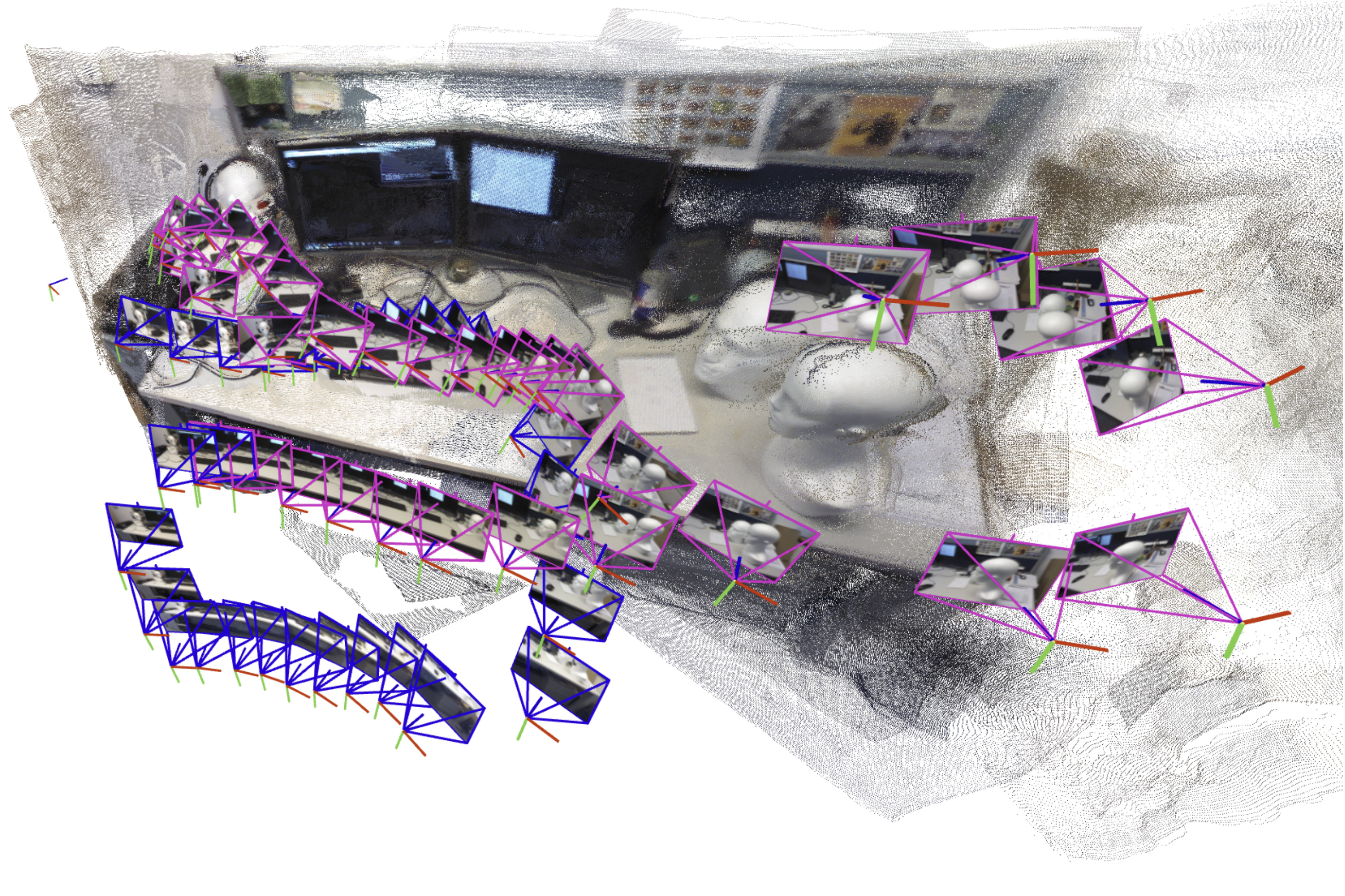
新系统生成小子地图并将其拼接成完整的3D地图,处理速度更快。
-
研究人员借鉴了经典计算机视觉的思想,开发了更灵活的数学技术来对齐子地图。
-
该系统在复杂场景中生成接近实时的3D重建,平均误差小于5厘米。
-
未来研究将致力于提高方法在复杂场景中的可靠性,并在真实机器人上实施。
延伸解读
技术背景与挑战
传统的同时定位与地图构建(SLAM)方法在复杂环境中常常面临挑战,尤其是需要预先校准相机。麻省理工学院的研究通过机器学习技术,克服了这些限制,使得机器人能够在动态和复杂的场景中快速生成3D地图。这一进展为机器人导航提供了新的可能性,尤其是在紧急救援等高压场景中。
应用前景与潜力
该系统不仅适用于搜索救援,还可以扩展到工业应用和增强现实设备。随着技术的成熟,未来可能在仓库管理、虚拟现实等领域发挥重要作用。研究人员的目标是提高系统在复杂场景中的可靠性,这将进一步推动其在实际应用中的普及。
方法的创新性
研究者们结合了经典计算机视觉和现代机器学习的思想,提出了一种新的数学技术来对齐子地图。这种灵活的方法使得在处理图像时能够更好地应对变形问题,从而提高了3D重建的准确性和速度。这种创新为未来的机器人技术发展提供了新的思路。
延伸问答
麻省理工学院的新系统如何生成3D地图?
该系统通过生成小子地图并将其拼接成完整的3D地图,同时实时估计机器人的位置。
新系统相比传统技术有哪些优势?
新系统在准确性和速度上优于传统技术,且不需要预先校准相机。
该技术适用于哪些应用场景?
该技术适用于搜索救援和工业应用,如机器人在仓库中快速寻找和移动货物。
研究人员如何解决子地图对齐的问题?
研究人员开发了一种更灵活的数学技术,通过对每个子地图应用数学变换来解决对齐问题。
该系统在复杂场景中的重建误差是多少?
该系统在复杂场景中的3D重建平均误差小于5厘米。
未来的研究方向是什么?
未来研究将致力于提高方法在复杂场景中的可靠性,并在真实机器人上实施。
