
动态规划简明教程 - 1
原文中文,约4600字,阅读约需11分钟。
📝
内容提要
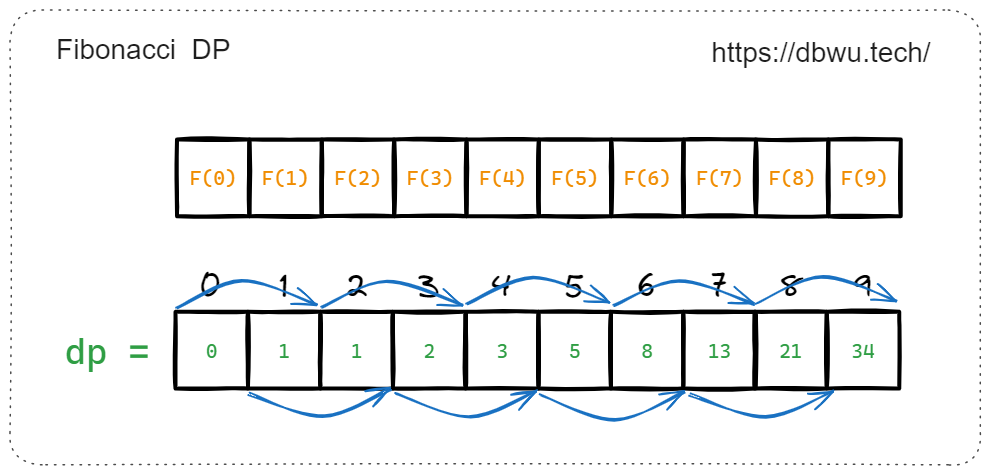
动态规划是一种解决复杂问题的方法,通过将问题分解为子问题并保存解以避免重复计算。其关键特征包括重叠子问题、最优子结构和无后效性。以斐波那契数列为例,动态规划通过状态转移方程自底向上计算,优化了性能。与暴力搜索和记忆化搜索相比,动态规划在时间和空间效率上表现更优。
🎯
关键要点
-
动态规划是一种通过将复杂问题分解为子问题并保存解来避免重复计算的方法。
-
动态规划的三个关键特征是重叠子问题、最优子结构和无后效性。
-
重叠子问题指在解决问题时需要多次解决相同的子问题,动态规划在此情况下具有优势。
-
最优子结构意味着问题的最优解可以通过子问题的最优解构造。
-
无后效性表示当前状态的解只与之前的状态有关,不受后续状态影响。
-
动态规划的状态转移方程设计是解决问题的前提,需确保依赖的子问题已被计算。
-
动态规划的实现过程包括定义问题状态、状态转移方程、初始化、计算子问题和计算原问题。
-
动态规划通过自底向上的方法逐步构建问题的解,性能优于暴力搜索和记忆化搜索。
-
状态压缩优化可以将多维数组压缩为一维数组,节省内存空间。
-
基准测试显示动态规划在性能上优于暴力搜索和记忆化搜索,且状态压缩进一步提升性能。
❓
延伸问答
动态规划的基本概念是什么?
动态规划是一种通过将复杂问题分解为子问题并保存解来避免重复计算的方法。
动态规划的三个关键特征是什么?
动态规划的三个关键特征是重叠子问题、最优子结构和无后效性。
动态规划如何优化性能?
动态规划通过自底向上的方法逐步构建问题的解,避免重复计算,从而优化性能。
什么是重叠子问题?
重叠子问题指在解决问题时需要多次解决相同的子问题,动态规划在此情况下具有优势。
动态规划的状态转移方程有什么作用?
状态转移方程是解决动态规划问题的前提,确保依赖的子问题已被计算。
动态规划与暴力搜索的性能差异如何?
动态规划在时间和空间效率上优于暴力搜索,能够显著减少计算时间。
🏷️
