本文探讨了人形机器人在“行走-操作”任务中的挑战,提出了一种集成式全身操控系统,结合强化学习、VR遥操作和触觉感知。研究者开发了具身触觉梦境的Transformer(HTD),通过多模态学习提升机器人对接触状态的理解和反应能力,简化了学习过程,旨在提高人形机器人的操作能力和灵活性。
斯坦福医学院的新研究表明,抑制“衰老酶”15-PGDH可以逆转关节损伤和老化,促进软骨再生。这一方法无需干细胞,可能为关节治疗带来革命性改变。实验结果显示,该酶的抑制显著改善了老年小鼠的关节软骨,并在人类样本中也取得了积极效果。
微悍动力推出三款高功率密度关节模组,包括超紧凑型WHJ03、大负载中空型WHJ120和WHJ48V宽压系列,旨在提升机器人性能,满足不同产业需求,推动智能设备发展。
TWIST2是一种新型人形机器人遥操作与数据采集系统,具备全身控制能力,便携且可扩展。它结合VR设备和低成本动作追踪器,实现高效的全身动作流传输,支持复杂任务如折叠毛巾和搬运物品。系统通过强化学习训练控制器,能够在长时序内执行精细操作,并高效采集人类操作数据,推动类人机器人在复杂环境中的应用。
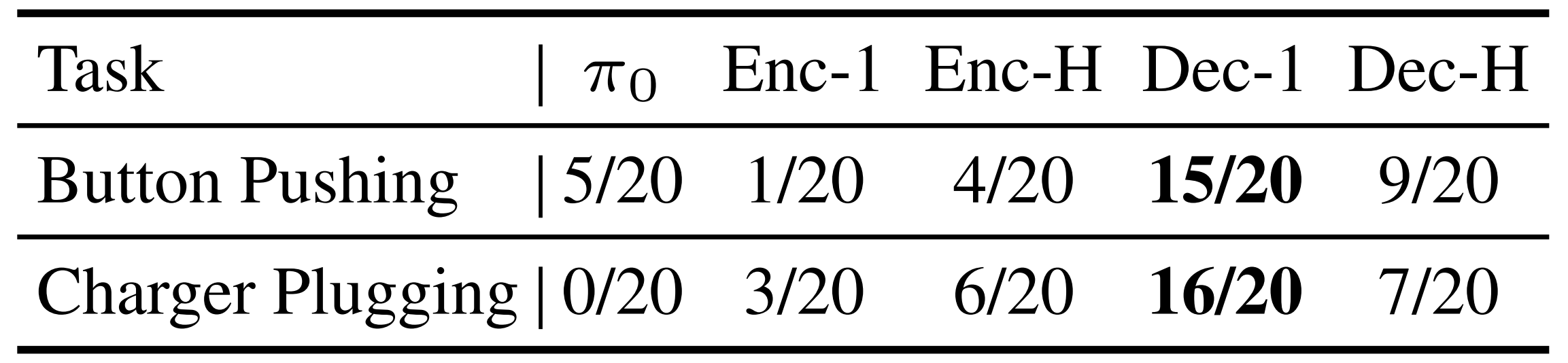
本文探讨了将关节力矩信号融入视觉-语言-动作(VLA)模型的设计,以提升机器人在物理交互中的表现。研究表明,将即时和历史力矩信息编码为单一解码器token能取得最佳效果,结合动作和力矩的预测任务可进一步增强模型性能。实验验证了该方法在高接触和常规任务中的有效性与泛化能力。
动易科技在2025世界机器人大会上展示了自研的高性能人形机器人PHYBOT M1和PHYBOT C1,以及高扭矩、高精度的PhyArc系列摆线关节模组,强调“Robot for AI”的研发理念,推动AI与现实世界的互动。
本研究解决了现有方法在处理多自由度物体时的局限性,尤其是在 occluded joints 和操作序列方面的不足。提出的物体运动学序列机器(OKSMs)能够捕捉运动约束和操作顺序,通过Pokenet 网络从人类示范中学习模型,显著提高了关节轴和状态估计的准确性。所提出的方法在模拟和真实世界样本上均取得了优异表现,具有广泛的应用潜力。
本研究提出了一种基于大型语言模型的图增强网络(TRG-Net),有效解决了骨骼动作分割中关节与动作关联被忽视的问题,显著提升了动作理解和分类性能。
本文提出了ArticuBot系统,旨在解决机器人在处理各种未见过的关节物体上的长期挑战。通过一个创新的分层政策表示,系统实现了有效的示范生成和零-shot仿真转真实操作,最终能在不同真实环境中成功打开多个未见过的关节物体,显示出显著的对象级泛化能力。
本研究解决了传统视觉可操作性方法在多样化和动态环境中适应性差的问题。我们提出了ManipGPT框架,利用大型预训练视觉变换器(ViT)预测关节物体的最佳交互区域,从而显著提高了部件级可操作性分割的效果,并成功应用于模拟和真实环境,这一成果在减少对复杂数据集和感知系统依赖方面具有重要意义。
本研究解决了现有交互式 3D 对象数据集稀缺的问题,提出了一种将静态 3D 对象转化为可开启的交互形式的新任务——静态到可开启(S2O)任务。通过构建统一框架和精心策划的数据集,我们的实验表明这一转化在理论上是可行的,但现实环境下的泛化能力存在挑战,为未来研究指明了方向。
本文介绍了一种视觉模仿学习方法,机器人通过人类演示学习操作任务,无需先前知识。该方法将模仿学习视为状态估计问题,利用自监督训练和摄像头自动移动,实现复杂交互轨迹。实验表明,该方法在多项任务中表现出色,能够从单一演示中学习多样技能并生成稳定控制器。
本文介绍了一种无监督学习物体及其部件关系的物理推理方法,提出了大规模关节物体知识库AKB-48和C-VAM任务,以提升物体理解能力。同时,研究探讨了自然语言模型对物理概念的理解,并提出了SAGE框架,实现关节物体的多样化操作。
本文介绍了多种基于神经辐射场(NeRF)的方法,如D-NeRF、NR-NeRF和BANMo,旨在实现动态场景的重建与渲染。这些技术能够从单目视频生成高质量的3D模型和新视角图像,探讨了非刚性场景的三维重建、场景分解及其面临的挑战,强调了在计算机视觉中的应用潜力。
MyoSuite是一种生物力学模型,能够支持复杂的生理变化和运动预测。研究中采用了基于物理知识的低样本学习和深度学习模型,显著提高了肌肉运动和关节角度的预测精度,展示了在手势识别和动态运动分析中的应用潜力。
本文评估了多学科对机器学习公正技术的批评,强调多样性在算法公平中的重要性,并提出提高算法公平性的具体措施。同时,探讨了人工智能对残疾人的道德影响,关注道德正义。最后,讨论了实现人工智能公平的框架和方法,提供应对偏见和歧视的实用建议。
本文研究了利用卷积神经网络(CNN)进行手部三维关节位置预测的方法。通过引入关节先验和上下文信息,显著提高了预测的精度和可靠性。研究结果表明,该方法在多个基准测试中超越了现有技术,且处理速度快,适用于实时应用。
Matrix推荐了一款火爆的多关节可动人偶Dummy 13,价格便宜且质量不错。这款人偶是3D打印圈的共创设计,可以用于商业目的。拼装过程简单,可摆出各种酷炫姿势。文章无广告,分享个人购买经验。
本文提出了一种稳健的关节网络(RoArtNet),用于关节式物体的感知和操纵,能够有效预测关节参数和可负担点。通过引入关节感知分类方案,增强了从模拟到真实场景的能力。实验结果表明,该方法在噪声环境中表现优异。同时,介绍了MARS数据集,促进自动驾驶研究,并提出多模态传感器融合方法,以提高物体检测精度。
本文提出了一种基于自监督学习的方法,通过彩色图像学习关节物体的几何、外表和动作表示,实现独立控制。该方法无需形态学注释,仅依赖2D观测,能够更精准地恢复物体形状和外观,适用于少样本重建和新视角生成等应用。研究表明,该方法在准确性和稳定性上优于传统3D监督方法。
完成下面两步后,将自动完成登录并继续当前操作。