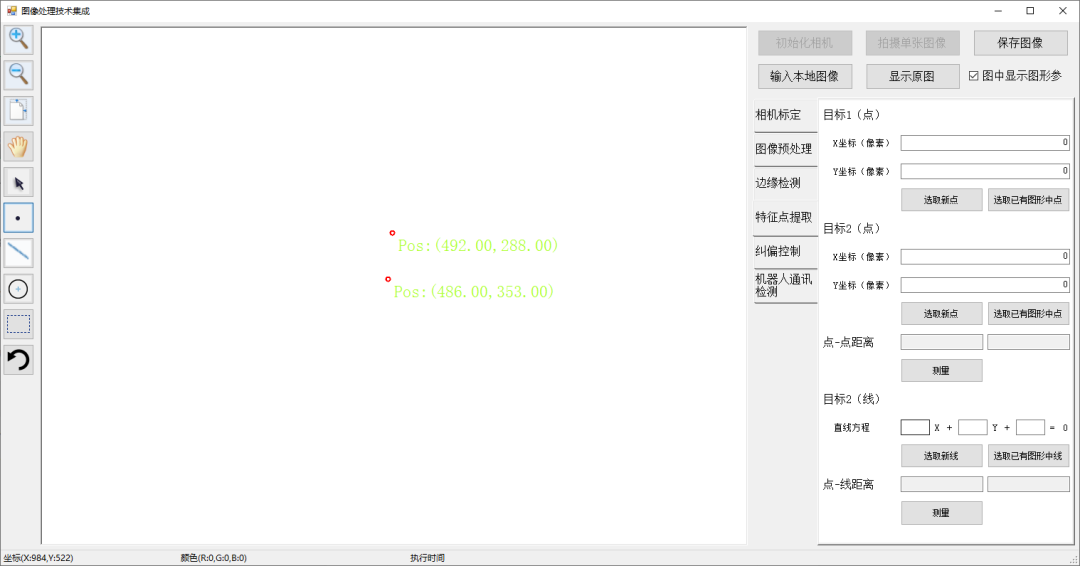
本文介绍了一款基于C#开发的图像处理与相机标定辅助系统,旨在实现高精度测量与识别。该系统支持自动和手动提取特征点,提供实时反馈,适合复杂环境下的标定。功能包括角点提取、直线拟合和动态配置标定板尺寸,界面简洁,操作直观,适合中小型项目及机器视觉学习。
本研究提出了一种基于分割符合预测框架的方法,旨在减轻大型视觉语言模型在视觉问答任务中的虚假内容问题。该方法通过动态阈值标定和跨模态一致性验证,在用户定义的风险水平下构建具有统计保证的预测集,适用于医疗和自动化系统等安全关键领域。
本研究解决了现有时间序列深度学习模型解释方法在处理时间依赖性和动态特征相关性方面的不足。提出的窗口化时间显著性重标定方法(WinTSR)通过显式捕捉过去时间步之间的依赖关系,提升了特征重要性的评估,且在与其他十种解释技术的比较中表现优越。该方法的推广及开源框架将为最新的时间序列变换器和基础模型的解释提供新工具。
本研究针对开放环境中多人体动作捕捉的精确性问题,提出了一种新颖的混合无标定方法FreeCap。该方法结合了单个LiDAR和可扩展移动摄像头,通过引入一种 pose-aware 交叉传感器人匹配模块和细化的姿态优化器,显著提高了动作捕捉的准确性和灵活性,具有广泛的应用潜力。
本研究解决了在没有光谱测量的情况下,星系光度红移概率密度的误标定问题。提出的CLAP方法结合了监督对比学习和K近邻算法,通过新颖的校准过程显著提升了概率密度估计的准确性和计算效率。这一方法为天文学和宇宙学应用提供了更可靠的光度红移概率密度估计。
该研究提出了多种相机标定方法,包括CompenNet++、SynthCal和基于高斯过程的校准,显著提高了标定精度。通过创新的自标定方法和镜面反射的利用,克服了传统方法的局限性,实验结果验证了新方法在合成和现实数据上的有效性与准确性。
本研究提出了一种数据驱动框架,用于低成本陀螺仪的误差估计。通过56分钟的数据集,陀螺仪比例因子和偏置估计精度平均提升72%。该方法将标定时间缩短至六秒,实现75%的时间改进,优化了传统模型。
本文介绍了一种新方法,通过方形平面标记同时解决定位和建图问题,优化相机标定和姿态估计。研究表明,该方法在复杂环境下表现优越,能够提高相机校准的准确性。
本文提出了多种相机标定方法,包括基于几何约束的损失函数、无标定目标方法和利用球面镜图像的高精度标定。这些方法在提高标定精度和降低计算成本方面表现优异,适用于实际应用。
本文介绍了一种段落排名器方法,提升开放域问答系统的性能,平均提高7.8%。研究提出了REAR方法,通过引入排名头和优化训练,显著提高检索效果,改善了大型语言模型的响应质量,解决了信息陈旧等问题。
该研究提出了一种知识发现网络(KDN)的重标定连接(RC)方法,用于解决卫星图像中小型目标检测的精确定位难题。该方法能够有效提取多尺度特征,减少干扰激活,提高检测器的学习方向。实验证明,在五种规模优选任务上,嵌入n21S的检测架构表现出良好的有效性和效率。
本文探讨了多鱼眼相机系统的标定与处理,应用于自动泊车场景。研究提出了一种基于图像输入的停车位检测算法,利用YOLOv4和新型边界框模型实现高效分类,并通过协同感知网络提升环境感知性能,特别是在行人检测方面,展示了基础设施辅助的优势。
本研究提出了一种新型光场超分辨率算法,通过多帧信息提升空间分辨率,并结合图形正则化器以简化差异估计。实验结果表明,该算法在PSNR和视觉质量上优于现有方法。此外,研究还探讨了深度估计、相机标定和三维重建等技术,展示了其在不同场景下的有效性和优势。
本文探讨了多种手眼标定方法,结合深度学习和几何视觉技术,提高机器人抓握和姿态估计的精度。研究提出了一种低成本、无需昂贵传感器的算法,优化了机器人与摄像头的协调,增强了机器人在复杂环境中的操作能力。实验结果表明,这些方法在实际应用中表现出色,具备良好的鲁棒性和实时性。
研究了顺序预测中校准度量的真实性,发现传统校准度量很难实现真实性,引入了一种新的校准度量 (SSCE),能够实现真实性,并成为最佳预测方法。
本文介绍了一种名为CaLiCa的深度自校正网络,能够自动校准针孔相机和激光雷达。实验结果表明,其精度为0.154度和0.059米,重投影误差为0.028像素。该算法通过单目深度估计和激光雷达点云的互信息,自动更新校准值,提升自动驾驶系统的感知能力。此外,研究还提出了多模态融合模型CoopDet3D,显著提高了三维物体检测性能。
本文探讨了随机特征岭回归在机器学习中的泛化性能,分析了随机特征数量和训练集大小对模型表现的影响。研究表明,参数化对模型性能的影响复杂,适当的特征选择和正则化方案能够提高泛化能力并降低计算复杂度。
本文介绍了一种实时无标定板双目相机标定方法,利用非线性优化最小化几何误差,具有鲁棒性和快速运行速度。提出的校准方法包括基于遮挡关系的无标定目标方法和伪激光雷达自校准方法,均在实际应用中表现出高精度和低误差,适用于自动驾驶和多传感器融合。
本文提出了一种新方法,通过数字图像相关技术从单幅图像中估计相机的标定参数,包括有效焦距和外部参数。研究表明,该方法在合成和实际数据集上相较于现有技术具有更高的准确性和可比的运行时间。
该论文探讨了联邦学习中的标签倾斜和对抗训练问题,提出了 Calibrated FAT 和 DBFAT 算法,以提高模型的鲁棒性和准确性。研究表明,这些方法在不同数据集上优于传统基准,有效应对非 IID 数据的挑战。
完成下面两步后,将自动完成登录并继续当前操作。