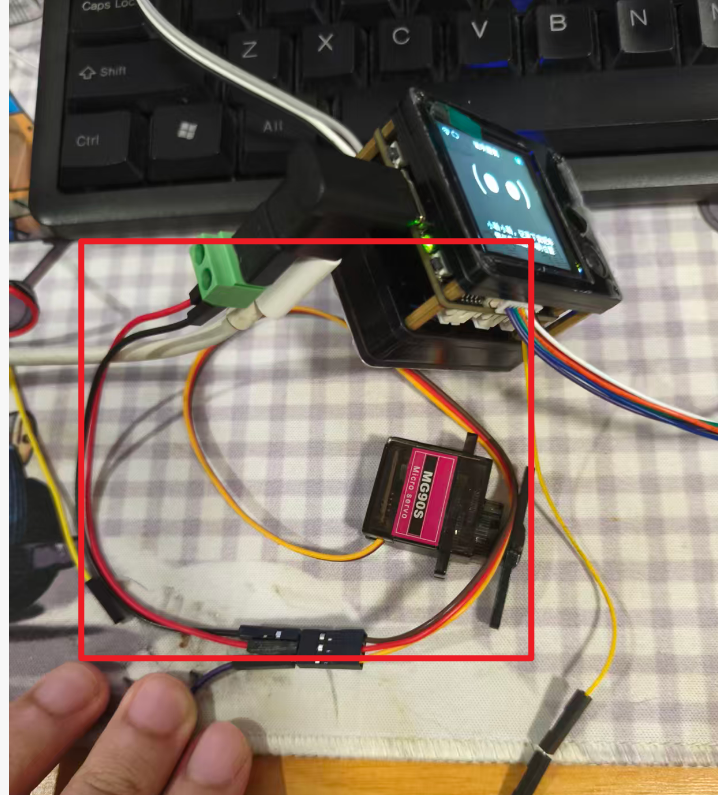
本文介绍了如何使用MCP工具通过语音指令控制LS26(Arcs-mini)开发板上的MG90S舵机。用户可以通过四次点击按钮启动或停止舵机旋转,并通过云端调用MCP工具设置旋转方向和速度。教程包括硬件接线、代码实现及常见问题解决方案,适合初学者。
本文介绍了如何使用.NET IoT开发智能桌面机器人,涵盖舵机控制、I2C通讯和动画播放等技术,解答了电路板和树莓派的常见问题,并提供代码示例以帮助理解机器人的功能和实现方法。
本文介绍了如何使用Arduino连接PS2摇杆和SG90舵机。摇杆通过ADC引脚接收模拟信号,读取x、y坐标及按钮状态。舵机通过PWM信号控制,能够逐渐旋转到180度和0度。
本文介绍了将舵机改装成360°连转舵机的方法,包括拆开舵机、修改齿轮、封电位器和组装等步骤。通过在舵机供电线路上串接继电器,并使用attach()和detach()函数控制舵机的连接和断开,可以解决杂音问题。
本文介绍如何将舵机改装成360度连转舵机,并通过代码解决杂音问题。改装过程包括拆开舵机、修改齿轮、封电位器、组装和调试。解决杂音问题的方法是使用attach()和detach()函数控制舵机的连接和断开。
本文介绍如何将舵机改装成360度连转舵机,并用代码解决杂音问题。改装过程包括拆开舵机、修改齿轮、封电位器、组装和调试。解决杂音问题的方法是使用attach()和detach()函数。
本文进一步理解了航模舵机控制及其PWM调制。航模接收机的PWM信号不仅仅通过占空比来控制舵机,还关注每个周期内高电平的时间长度。舵机的最小角度对应1ms的高电平时间,最大角度对应2ms的高电平时间,中位角度对应1.5ms的高电平时间。舵机的工作频率一般选择50Hz,脉冲宽度为1-2ms,占空比为5%-10%。电调的信号与舵机相同。
该文章介绍了如何使用ESP32通过ESP-NOW模式传输遥控信号。遥控端读取摇杆信号并进行广播,接收端将信号转换为PWM以控制舵机和电调。代码部分涵盖了发送和接收的实现,重点说明了MAC地址设置和接线方式。
完成下面两步后,将自动完成登录并继续当前操作。