

💡
原文中文,约9200字,阅读约需22分钟。
📝
内容提要
本文翻译了《智能体设计模式》第六章,强调规划在智能体编程中的重要性。规划帮助智能体将复杂目标分解为可管理的步骤,并自主制定实现策略。智能体通过适应性应对变化,优化任务执行,尤其在动态环境中表现优异。规划模式为复杂问题提供结构化解决方案,提升智能体执行能力。
🎯
关键要点
- 规划在智能体编程中至关重要,帮助将复杂目标分解为可管理的步骤。
- 智能体通过适应性应对变化,优化任务执行,尤其在动态环境中表现优异。
- 规划模式为复杂问题提供结构化解决方案,提升智能体执行能力。
- 动态规划是一种特定工具,适用于已知解决方案的问题。
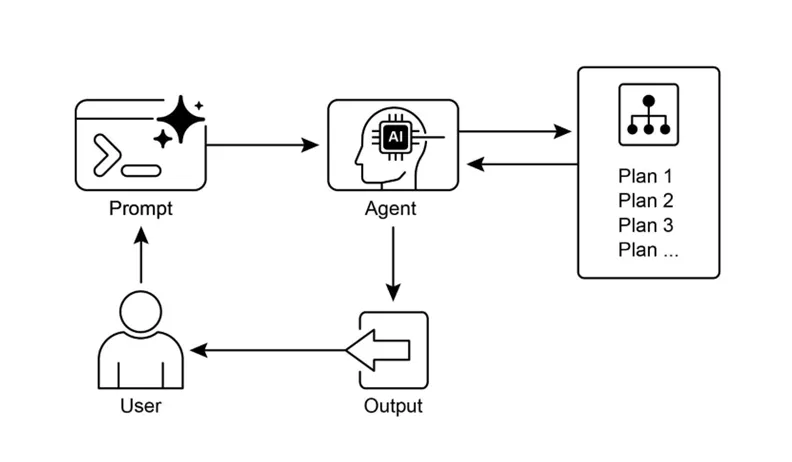
- 智能体能够将高级目标转换为结构化计划,协调复杂工作流程。
- 在机器人技术和自主导航中,规划是状态空间遍历的基础。
- 规划模式允许智能体超越简单反应,转向目标导向的行为。
- Crew AI 框架展示了如何实现规划器模式,智能体先制定计划再执行。
- Google Gemini DeepResearch 通过多步骤代理管道进行自主信息检索和合成。
- OpenAI 深度研究 API 自动化复杂研究任务,提供结构化、引用的输出。
- 规划模式是将代理系统提升为战略性执行者的基础组件。
➡️
