

.NET 8 + WPF 做工业机器人3D仿真?HelixToolkit 真香
💡
原文中文,约3000字,阅读约需8分钟。
📝
内容提要
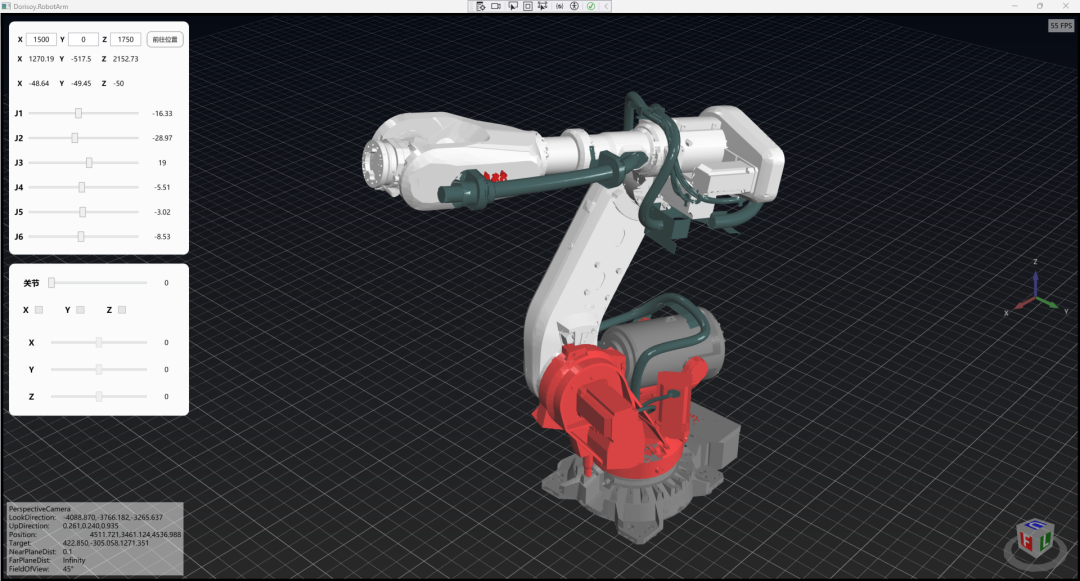
基于C# .NET 8.0和WPF的工业机器人3D仿真系统,支持正逆运动学计算,具备手动控制、自动目标到达和关节调试功能,使用HelixToolkit实现高效渲染,适合学习和工程验证。
🎯
关键要点
- 基于 C# .NET 8.0 和 WPF 的工业机器人3D仿真系统,支持正逆运动学计算。
- 项目是一个完整的机器人机械臂3D仿真应用,使用 HelixToolkit 实现高性能渲染。
- 系统功能包括手动关节控制、自动目标点到达和关节调试可视化。
- 支持正运动学(FK)和逆运动学(IK)计算,实时显示末端执行器位置。
- 通过滑块实时调整关节角度,机械臂姿态即时更新。
- 提供可视化调试辅助,标示当前选中关节的旋转中心。
- 支持两种 ABB 工业机械臂型号:IRB 4600 和 IRB 6700。
- 项目使用 .NET 8.0、WPF 和 HelixToolkit,推荐使用 Visual Studio 2022 开发。
- 逆运动学算法基于梯度下降法,参考相关教程实现。
- 项目结构清晰,代码注释详尽,易于理解与二次开发。
- 提供详细的安装和运行步骤,支持用户自定义机械臂型号。
- 设计理念为轻量、透明、可学习、可扩展,适合学习和工程验证。
➡️
