

谷歌地图可以告诉Polestar 4驾驶员何时合并车道
The Verge
·

《公路快跑者》—— 一款基于Amazon Q CLI构建的Python游戏
DEV Community
·

为什么沥青密封对渥太华的房主至关重要?
DEV Community
·
/cdn.vox-cdn.com/uploads/chorus_asset/file/25472453/STK270_GOOGLE_MAPS_C.png)
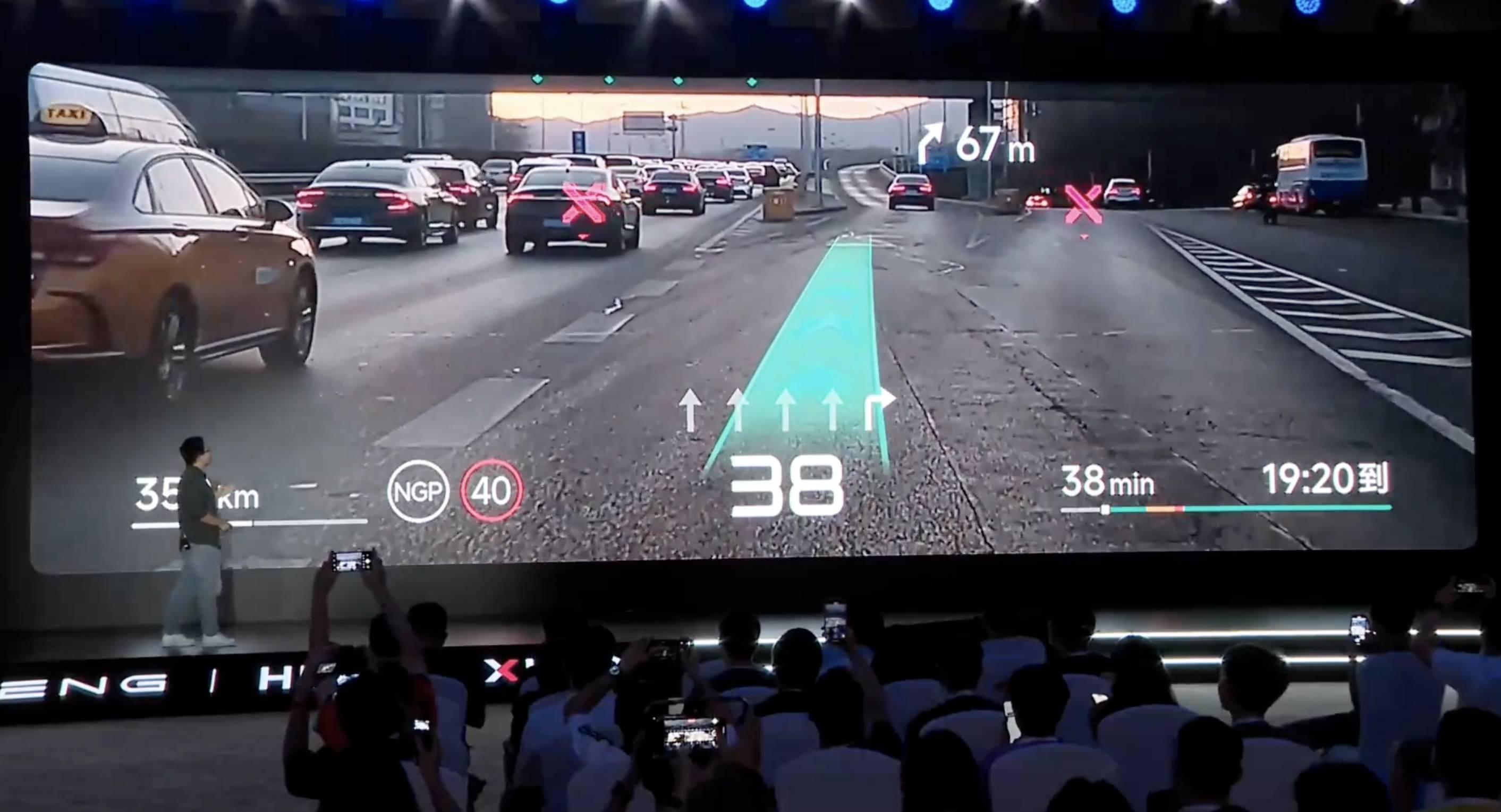
谷歌地图的增强导航功能将确保您在正确的车道上
The Verge
·
LaneTCA:通过时间上下文聚合提升视频车道检测
BriefGPT - AI 论文速递
·
/cdn.vox-cdn.com/uploads/chorus_asset/file/25519749/1257514095.jpg)
