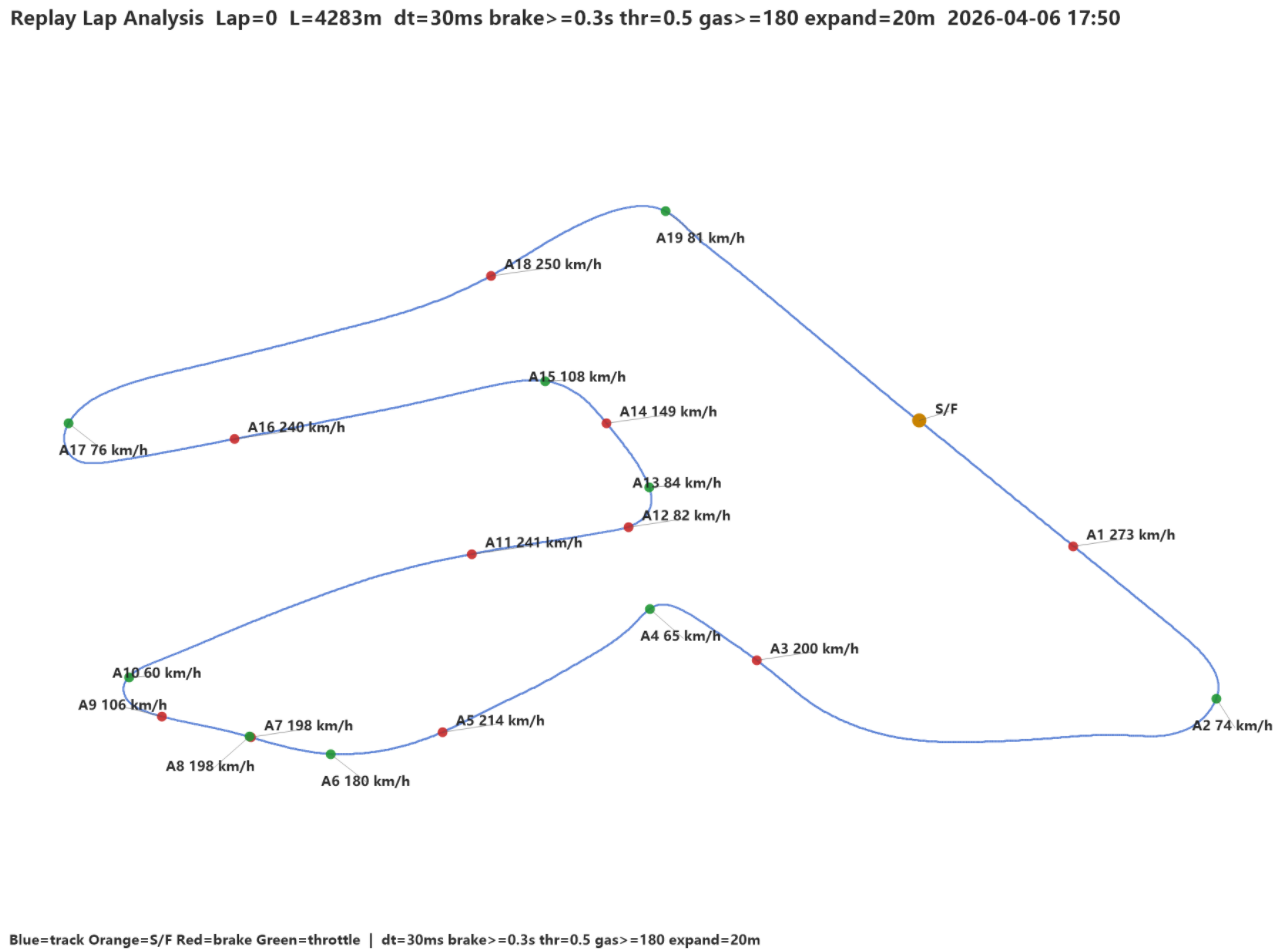
本文探讨了如何使用AI工具分析AC模拟器的回放数据,并将其转换为理想行车线格式。通过与AI的互动,作者成功提取和优化了轨迹,解决了行车线替换及刹车、油门提示的问题。最终生成的理想行车线满足需求,并讨论了如何将项目打包为可执行文件。作者总结了使用AI进行项目开发的经验,强调了需求明确性和逐步验证的重要性。
本研究提出了一种自适应运动优化(AMO)框架,旨在解决人形机器人在高自由度和非线性动态下的运动控制问题。AMO结合了仿真-现实强化学习与轨迹优化,实现了实时自适应的全身控制,显著提高了稳定性和操作工作空间,支持机器人自主执行任务。
我开发了一个空间碎片避碰与轨迹优化系统,利用AI预测碎片运动并优化火箭轨迹,确保安全任务规划。系统特点包括实时碎片跟踪、基于强化学习的轨迹优化和交互式3D可视化。使用KendoReact提升UI/UX,提供直观输入和实时警报。未来计划提高模型准确性并集成实时数据。
本文提出了一种低成本的数据生成管道,结合物理模拟和人类示范,有效生成用于机器人操作任务的数据集。通过轨迹优化技术,处理虚拟现实中的示范数据,适应不同机器人形态,实现数据重用。实验表明,训练的策略能在多种机器人形态下成功执行复杂任务。
本研究探讨了小行星的可持续采矿问题,尽管在GTOC 12比赛中排名不高,但开发了多种新方法。这些方法结合了机器学习与天体动力学,显著改善了低推力轨迹与冲击拉姆伯特转移的关系,并提出了通过整数线性规划优化采矿轨迹的新技术。
本文探讨了通过内部记忆方法学习高维连续系统的策略,结合有监督学习和轨迹优化,解决物理控制问题。研究利用RNN和贝叶斯推断,提出了动态规划和主动推断的框架,强调在复杂环境中有效规划行动的重要性,并探索分层模型中的混合表示。
本文提出了一种基于探索的轨迹优化方法 ETO,旨在提升开放式 LLM 代理的性能。ETO 允许代理从失败中学习,通过对比学习更新政策,促进持续改进。实验表明,ETO 在复杂任务中显著超越基线性能,并在缺乏专家轨迹时展现出高效性。
本文提出了一种结合扩散模型和数值求解器的框架,用于非凸轨迹优化,显著提升计算效率和约束满足性。通过引入新的受约束扩散模型,该方法在不同机器人领域的实验中实现了4到22倍的加速,成功应用于动态环境中的轨迹预测,展现了优越性能。
本文分析了一种基于任务导向探索的框架,通过模拟环境学习任务相关的系统参数,以优化现实世界中的轨迹。研究表明,该方法能提高模型的适应性和任务表现,尤其在系统参数未知时。利用深度强化学习,机器人能够在模拟与真实环境中有效转移控制策略,提升操控技能和训练效率。
本文研究了使用无人机定位目标无人机的问题,并提出了基于Z函数分解的强化学习方法,通过优化轨迹和发送功率来提高定位精度。仿真结果表明,该方法可以减小定位误差。
本文提出了一种针对机械操作的轨迹优化方法,使用混合整数二次规划进行评估,并考虑了互补和状态的联合机会约束。与近期方法进行了比较。
完成下面两步后,将自动完成登录并继续当前操作。