
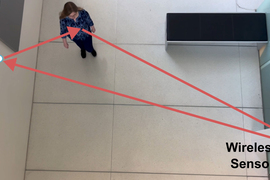
生成性人工智能改善了透视障碍物的无线视觉系统
MIT News - Artificial intelligence
·

大疆Neo 2自拍无人机新增障碍物避让和手势控制功能
The Verge
·

黑芝麻智能推出面向高速运输网络的AI障碍物检测与预警系统
全球TMT-美通国际
·

在有障碍物的二维网格中使用A*搜索算法找到最短路径
DEV Community
·

到达角落的最小障碍物移除
DEV Community
·

AoC '24 - 第6天:守卫的漫游
DEV Community
·
