上一个工具 bitflip/baize 解决的是丢包和改包持续检测,在百度baize常常用在点到点之间的常态检测中,比如机房内集群间的监控,专线的检测, 新网络方案测试和灰度观察、核心网络设备的切回前检测等场景。<
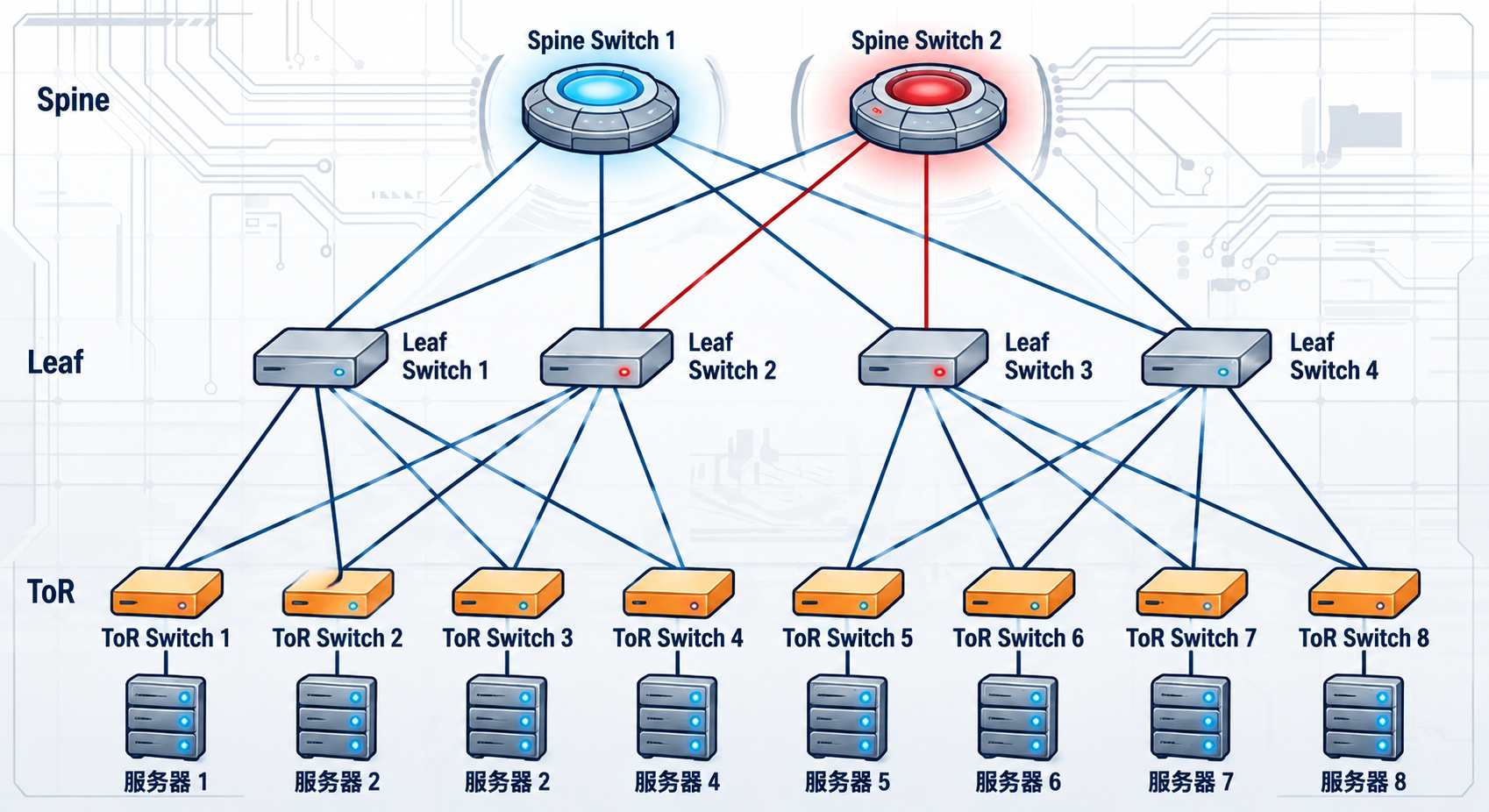
百度推出了开源网络监控工具lidar,旨在提高机房内服务器的探测效率。与传统的pingmesh不同,lidar通过发送TCP SYN包实现快速探测,无需额外配置,能实时反馈端口状态,解决了现有监控系统的时效性和准确性问题,满足了云客户的需求。
广汽埃安在长沙预售埃安N60,起售价11.58万元,标配激光雷达,搭载ADiGO GSD3.0系统。该系统由广汽与文远知行联合开发,具备高效算法和多种传感器,标志着智能辅助驾驶技术向主流市场的扩展。
Rivian宣布开发自主AI芯片,并计划推出支持Lidar传感器的R2车型,具备4级自动驾驶能力。新AI助手将与车辆操作深度整合,提升驾驶辅助功能。尽管面临竞争,Rivian仍专注于自主驾驶技术的提升。
本文介绍了PhysHSI系统,该系统旨在实现人形机器人在真实环境中的自然场景交互。通过结合LiDAR和相机,PhysHSI能够自主完成复杂任务,如搬运箱子、坐下和躺下。系统利用对抗运动先验(AMP)框架,提升了机器人在多样化场景中的泛化能力和自然动作表现。实验结果显示,PhysHSI在各种任务中表现出高成功率和良好的动作质量,展现了其在真实世界应用中的潜力。
长沙具身团队正在扩招,分为三个项目组,专注于电源、USB插拔及人形机器人技术。CLONE系统通过闭环遥操作解决了人形机器人长时任务中的位置反馈问题,提升了人机协作能力。
本研究解决了服务移动机器人在有限计算资源下需要实时避开动态物体的挑战。提出的轻量级多模态框架通过结合LiDAR和相机输入,采用新颖的Cross-Modal Deformable Transformer和Reference Trajectory-based Multi-Class Transformer,实现了高精度的物体检测和有效的轨迹预测,显著提高了检测和预测的性能。
索尼电子公司宣布AS-DT1 LiDAR深度传感器商业化,尺寸29mm,重50克,适用于无人机和机器人。该传感器采用dToF技术,能够精确测量低对比度和低反射率物体,预计2026年春季上市。
本文介绍了Turin3D数据集,覆盖都灵市中心约1.43平方公里,包含近7000万个点,旨在解决城市建模中的标签稀缺问题。通过比较多种点云语义分割模型的性能并应用半监督学习技术,显著提升了模型表现。该数据集将公开发布,推动户外点云分割研究的发展。
本研究提出了一种基于图注意力的贝叶斯深度展开算法,旨在解决单光子激光成像在嘈杂环境中多目标处理的困难。该方法结合分层贝叶斯模型和神经网络,提升了成像的准确性和不确定性量化能力,实验结果表明其在复杂场景中的表现优越。
本文介绍了一种名为Uni-Gaussians的仿真系统,旨在解决自动驾驶中相机与LiDAR联合仿真的问题。该系统利用高斯基元实现高效的动态场景模拟,显著提升了仿真质量和计算效率。实验结果表明,Uni-Gaussians在点云和图像渲染方面表现优异,提供了有效的解决方案。
本研究提出了一种NTN方法,解决了激光雷达语义分割在恶劣天气下对“事物”类别预测不准确的问题,通过特征绑定和正则化显著提升了准确性和鲁棒性。
本研究解决了使用LiDAR测量进行大规模户外环境3D映射时平滑且无伪影的表面重建问题。文章提出了一种基于深度学习的方法,通过优化物理信息损失函数来学习表面流形的带符号距离场,从而降低表面尖锐边缘的出现。实验表明,该方法在准确性和光滑度上优于现有的先进技术。
本研究提出了一种可用性感知传感器融合方法(ASF),旨在克服自主驾驶中传感器可用性假设的局限性。ASF通过统一典范投影和跨传感器注意力,在各种天气和传感器降级条件下显著提升了目标检测性能。
本研究提出了一种新的邻域占用掩码自编码器(NOMAE),旨在解决LiDAR点云自监督学习中的大面积空白问题。NOMAE通过在非掩码体素邻域内进行占用重建,有效克服了信息泄漏和计算复杂性。研究结果表明,该方法在语义分割和3D目标检测任务中表现优异,具有重要影响。
本研究提出D-PLS方法,解决4D全景激光雷达分割中语义分割与实例分割的耦合问题。利用单次扫描的语义分割作为先验信息,显著提升了分类和关联任务的性能。
本研究提出了一种自监督预训练框架AD-L-JEPA,利用激光雷达数据减少自主驾驶系统对标注数据的依赖,显著提升了嵌入质量和标签效率,实验结果优于现有方法。
本研究提出了一种新颖的计算成像算法,有效解决了单光子数据3D重建中的运动模糊和分辨率不足问题。实验结果表明,该方法在不同噪声和光子水平下显著提升了图像清晰度,验证了其适应性和实用性。
本研究提出了一种基于半球视场LiDAR传感器的人体分割与动作分类方法。该方法利用MaskDINO模型,能够有效检测和分割人体,并识别行走、挥手和坐下等动作,展现出良好的性能和应用潜力。
本研究提出了一种协作式LiDAR-4D雷达融合管道,利用V2X-R模拟数据集,解决了恶劣天气下V2X系统的3D物体检测问题。实验结果表明,该方法在雾天和雪天的性能显著提升,具有较大应用潜力。
完成下面两步后,将自动完成登录并继续当前操作。