



移远通信携手锐心观远、岸达科技推出国产单芯片8发8收ROS-SLAM毫米波雷达
全球TMT-美通国际
·
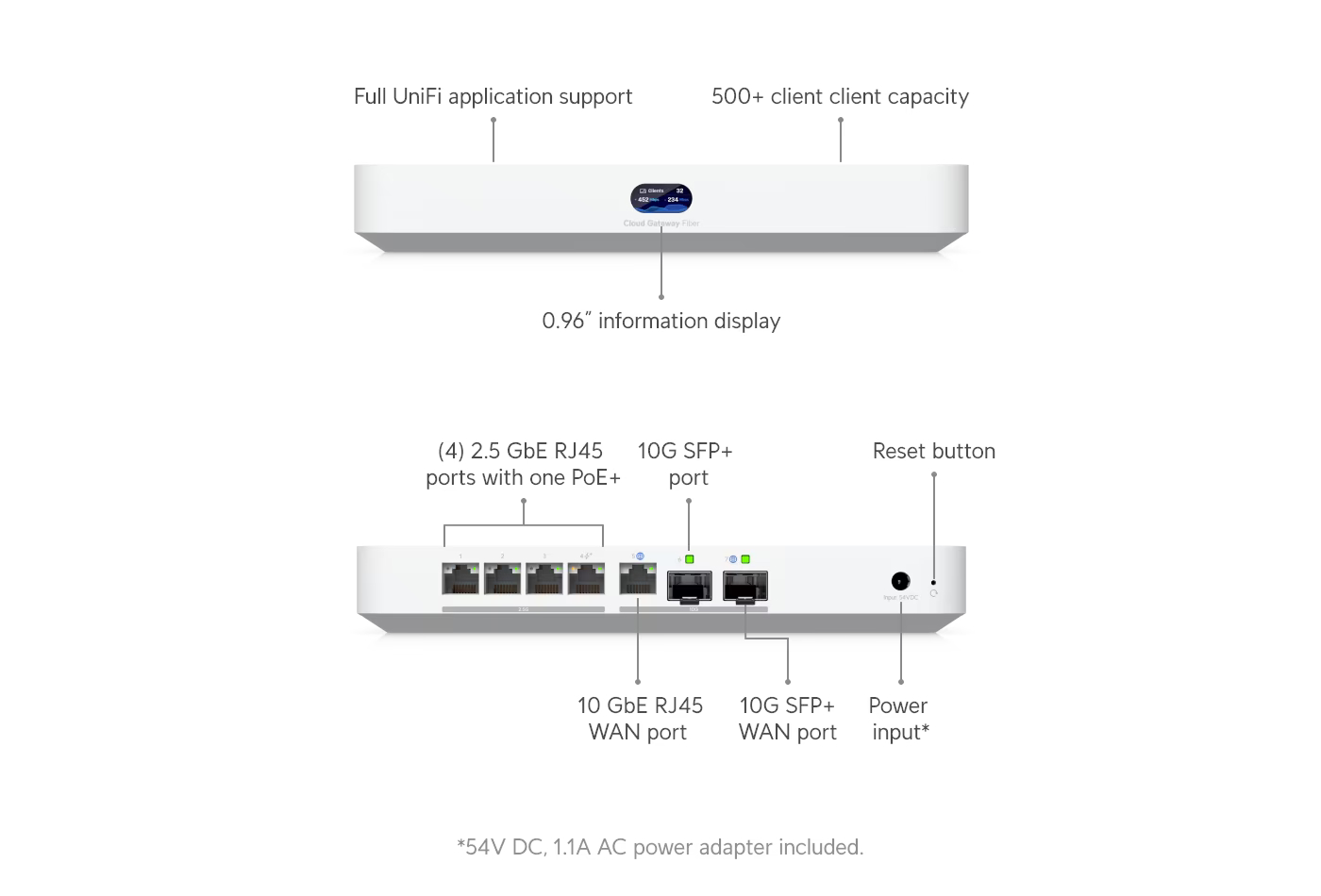
UCG Fiber 主路由器 + OpenWrt 透明代理 + 高可用 方案和评测(对比ROS)
WuSiYu Blog
·


机器人开发真的需要ROS吗?(剧透:不需要)
DEV Community
·

🔐 ROS 2与UFW的机器人安全:未来机器人技术的防火墙
DEV Community
·

设置安全的ROS 2系统:第三部分 安装ROS 2
DEV Community
·

🛡️ 设置安全的ROS 2系统:第二部分 - 更新Ubuntu和创建ROS用户
DEV Community
·


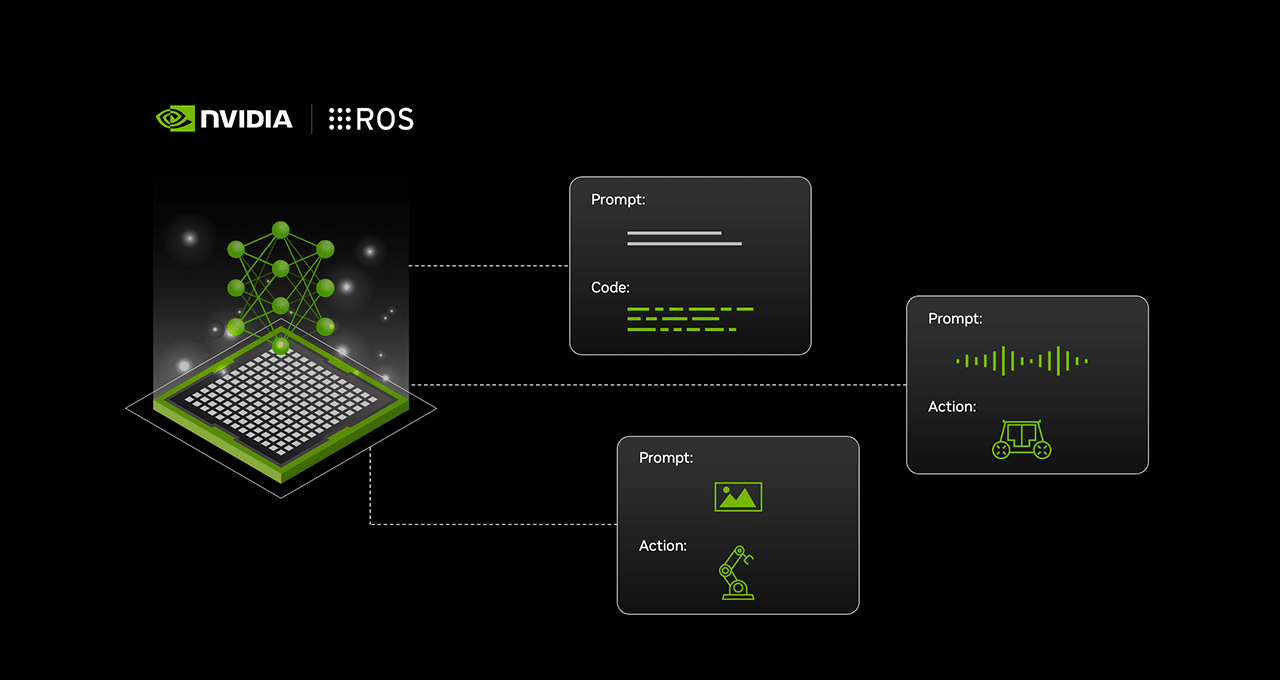
NVIDIA为ROS开发者生态系统带来生成式AI工具、仿真和感知工作流程
NVIDIA Blog
·
