
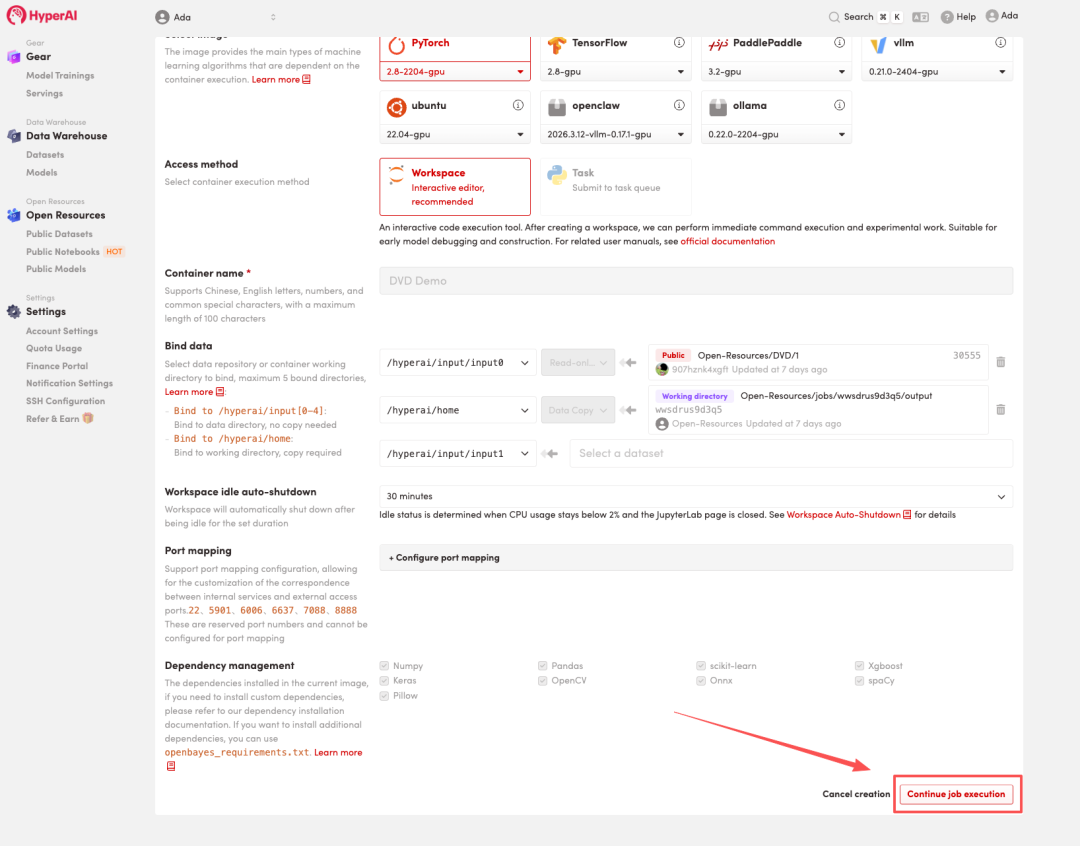
在线教程丨香港科技大学团队开源首个确定性视频深度框架DVD,零样本刷新 SOTA
HyperAI超神经
·
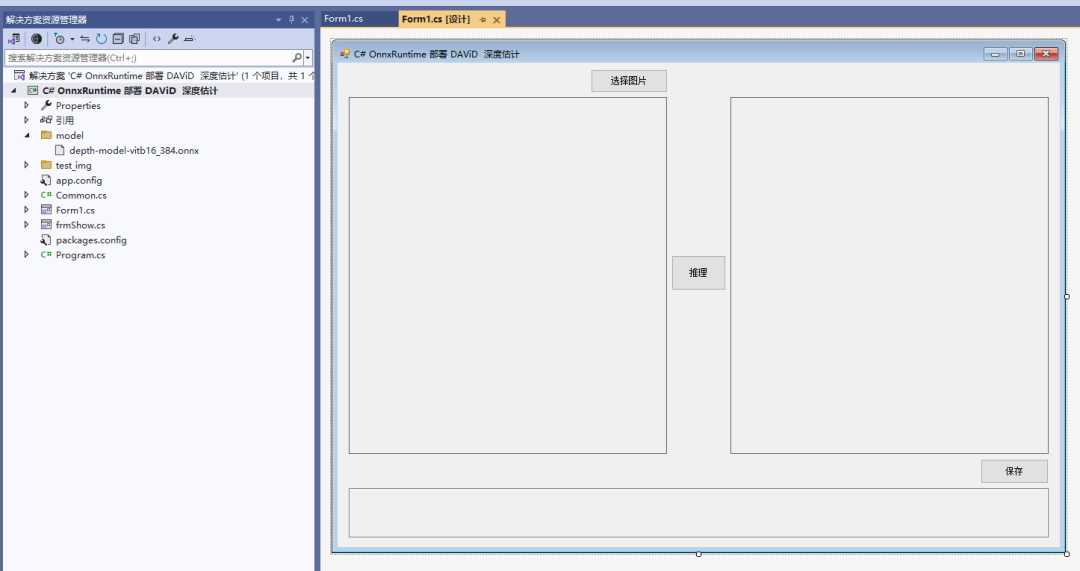
C# OnnxRuntime 部署 DAViD 深度估计
dotNET跨平台
·



实时无人机视觉系统以111 FPS处理空中图像,同时识别物体和距离
DEV Community
·

UniVG:一种用于统一图像生成与编辑的通用扩散模型
Apple Machine Learning Research
·

人工智能系统采用双分支架构为内窥镜图像添加深度感知
DEV Community
·
