

优步再次部署自主驾驶汽车,但并不作为机器人出租车
The Verge
·
人工智能周报第331期 - Nvidia公告、Grok比基尼提示、RAISE法案
Last Week in AI
·
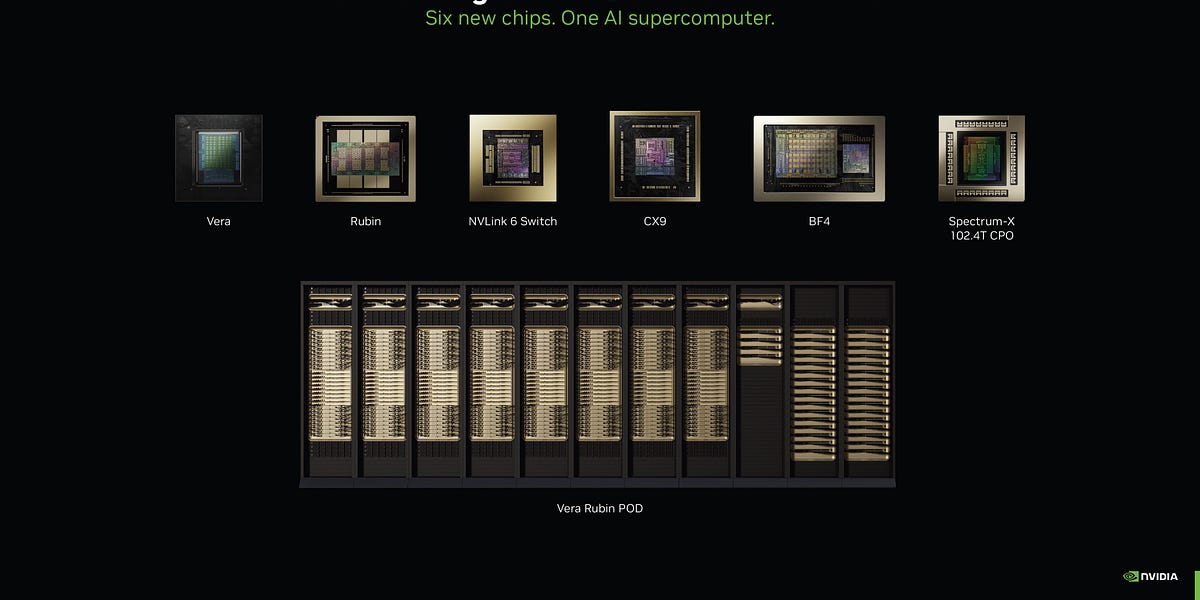
在NeurIPS大会上,NVIDIA推动数字与物理AI的开放模型开发
NVIDIA Blog
·

特斯拉表示已成功实现首个完全自主的汽车交付,从工厂直接送达客户
The Verge
·

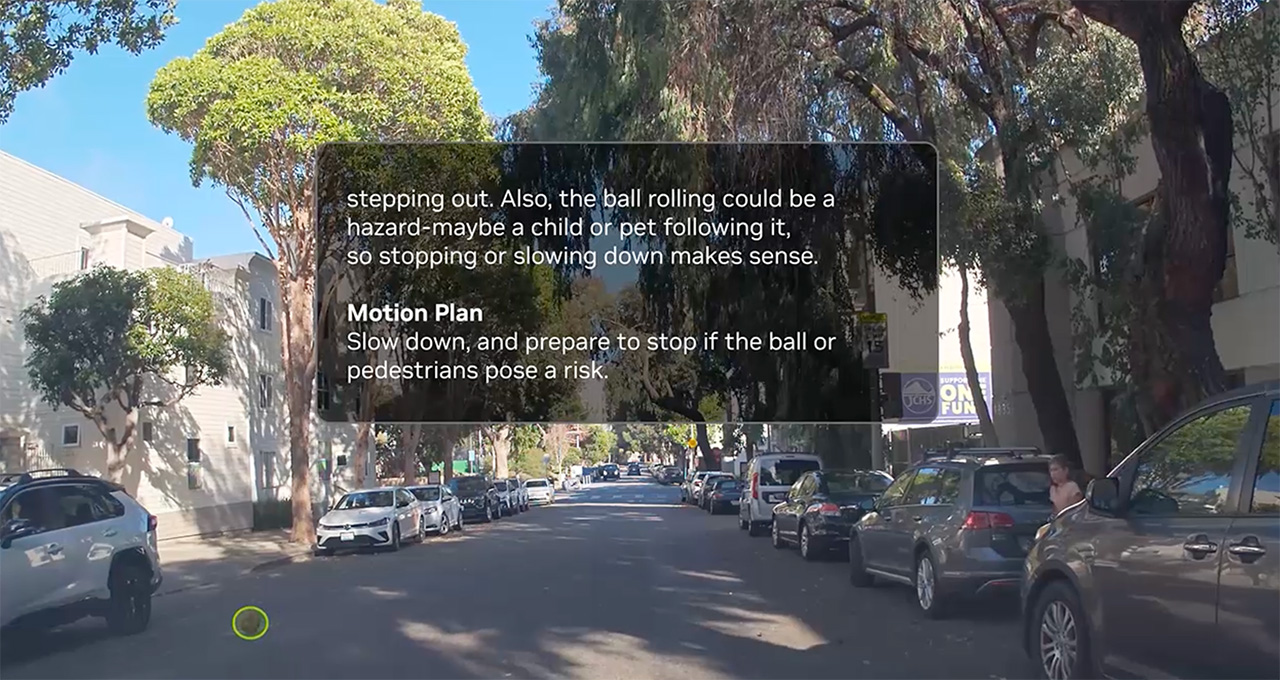
NVIDIA在CVPR大会上连续赢得端到端自主驾驶大奖
NVIDIA Blog
·

