
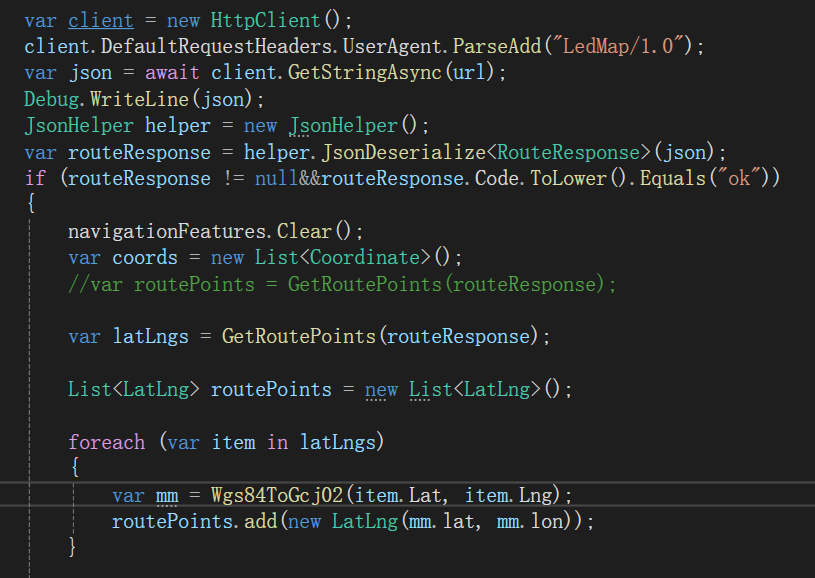
Avalonia跨平台入门第七十九篇之GIS路径规划
dotNET跨平台
·

开源高德地图及规划路径短代码插件
王叨叨
·

节卡机器人将携具身智能成果参加2025年世界机器人大会
全球TMT-美通国际
·
积算科技为清华未来立体通行挑战赛提供智能算力支持
全球TMT-美通国际
·
通过路径规划任务评估大型语言模型代码生成质量
BriefGPT - AI 论文速递
·

开启空间智能问答新时代:Spatial-RAG框架来了
机器之心
·
